H-Brücke mit dem NE556
von Holger Fritzsch
Wenn
man das sich das Blockschaltbild eines NE 556 ansieht, dann
bemerkt man eine Symmetrie der Bausteine, somit drängt sich die
Frage auf, ob man eine H- Brücke ähnlich dem L 293
realisieren kann.
Ja, man kann !
Vorliegende Schaltung
nutzt beide interne Timer des NE 556 aus. In dieser Konfiguration
stellt es eine sog. H- Brücke dar. Es ist möglich nur
über einen Port eines Mikrocontroller die Drehrichtung eines
Motors zu ändern. Baut man die Schaltung zweimal auf , so ist ein
kleiner Fahrroboter möglich. Das wäre dann in etwa „
das mobile Steckbrett“.
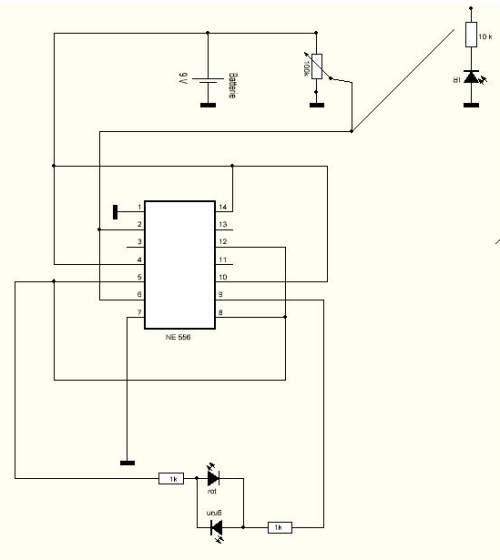
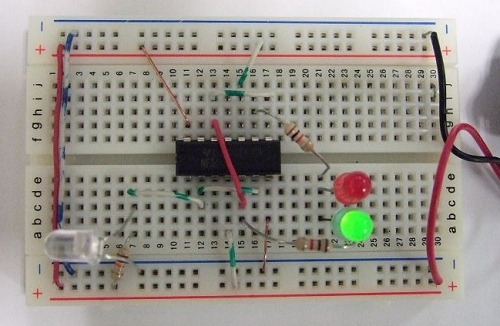
Funktionsprinzip
Der
Ausgang des 1. Timer ( pin 5) steuert den Trigger- (pin 8) und
Schaltschwelleneingang ( pin 12 ) an. Zwischen pin 5
(Timer1) und pin 9 (Timer 2) liegen zwei antiparallele LEDs. Nach
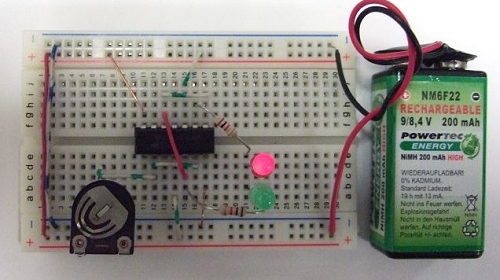
Anlegen der Batteriepannung und Reglerstellung ganz nach
„links“ , entspricht 0 V am Steuereingang des Timers 1 (
pin 2 / pin 6), leuchtet zunächst die rote LED auf.
Zwischen pin 5 und pin 9 liegen ca. 3,5V an, wobei pin 5 positiv ist.
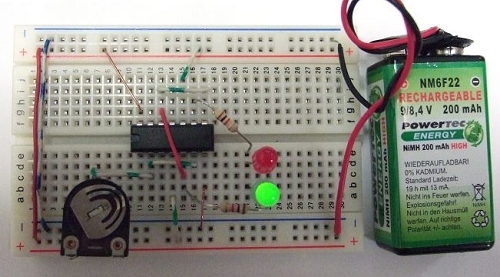
Dreht
man den Regler weiter nach „rechts“, so schaltet bei
ca. 4,8 V die grüne LED ein und die rote LED aus. Zwischen pin 5
und pin 9 liegen ca. 2V an, wobei pin 5 negativ ist.
Dreht
man nun den Regler wieder zurück (in Richtg. Masse), so geht bei
ca. 2,1 V die grüne LED aus und die rote LED erneut an. Es liegt
also eine Art Hysterese zwischen diesen beiden Punkten der
Eingangsspannung vor. Natürlich ist auch der Eingang (pin 2 /
6) mit einer Steckbrücke an Masse bzw. den Pluspol anlegbar
und die LEDs reagieren entsprechend darauf.
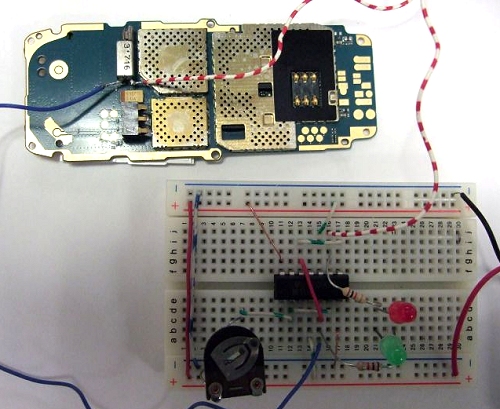
Beispiel 1
Statt
des Einstellreglers kann man eine IR-Diode anschalten. Diese wird wie
üblich in Sperrrichtung geschaltet . Der 10-kΩ-Widerstand
sorgt für den richtigen Arbeitspunkt der Diode. Bei Eintreffen von
IR- Strahlung wechseln die beiden LEDs hin und her. Somit ist eine
schnelle Prüfung einer Fernbedienung möglich.,
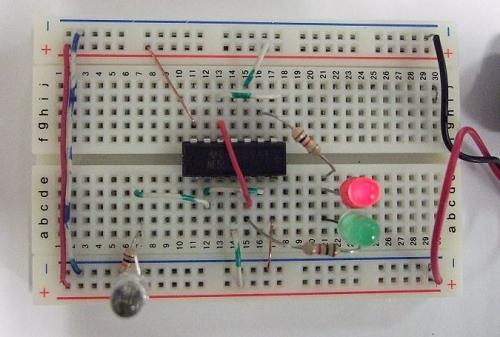
Beispiel 2
Schaltet
man statt der LEDs einen kleinen Motor an, so lässt sich dessen
Drehsinn ebenfalls ändern. (Anschluss eines zufällig
vorhandenen Vibrations-Motors).
Beispiel 3
Wie oben
schon erwähnt, ist die Ansteuerung dieser H- Brücke
über einen einzigen pin eines µC möglich. Dazu
ist dieser lediglich auf „high“ bzw. „low“ zu
setzen, sodass der Motor „umpolt“.