Unser
Amateurfunk-Ortsverband
L05 hat wieder einen kleinen Programmierkurs für Teilnehmer
ab 12 Jahren organisiert. Einige ältere Kollegen machen auch mit. Wir hatten
ein erstes Treffen mit einer knappen Einführung und einigen
HF-Experimenten. Nun arbeitet jeder für sich weiter. Einige der
Ergebnisse werden hier gesammelt.
Aufzugsteuerung
Alex
wollte zwei Kontrolllämpchen in einem Aufzug steuern. Der Benutzer kann auf
einen Taster drücken.
Ganz einfach: Gedrückt grün, losgelassen rot
#Aufzug1
from machine import Pin
import time
p2= Pin(2, Pin.OUT)
p5= Pin(5, Pin.OUT)
p19 = Pin(19, Pin.IN, Pin.PULL_UP)
while True:
if (p19.value()==0):
p2.value(1)
p5.value(0)
else:
p2.value(0)
p5.value(1)
Der zweite Versuch war komplizierter. Der Aufzug steht immer unten.
Wenn ich drücke, geht er hoch (grün). Wenn er da ist, lasse ich los und
steige ein. Dann geht er wieder runter (rot) und bleibt da bis zum
nächsten Schalterdruck.
#Aufzug2
from machine import Pin
import time
p2= Pin(2, Pin.OUT)
p5= Pin(5, Pin.OUT)
p19 = Pin(19, Pin.IN, Pin.PULL_UP)
while True:
while (p19.value()==1): #auf Taster warten
time.sleep(0.1)
while (p19.value()==0): #gedrückt
p2.value(1) #grün
p5.value(0)
time.sleep(1) #wieder losgelassen
p2.value(0)
time.sleep(1)
p5.value(1) #rot
time.sleep(5)
p5.value(0)
Geschwindigkeitsmessung
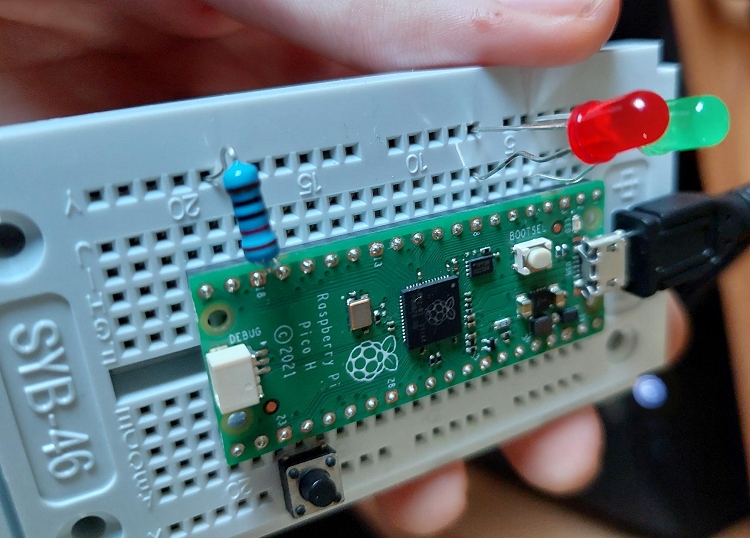
Dietrich wollte die Geschwindigkeit von Autos
messen. Er hat zwei Wegmarken im Abstand von ca. 50 m. Ein Taster wird so lange
gedrückt, wie das Auto auf dieser Strecke ist. Das Programm berechnet
dann die Geschwindigkeit.
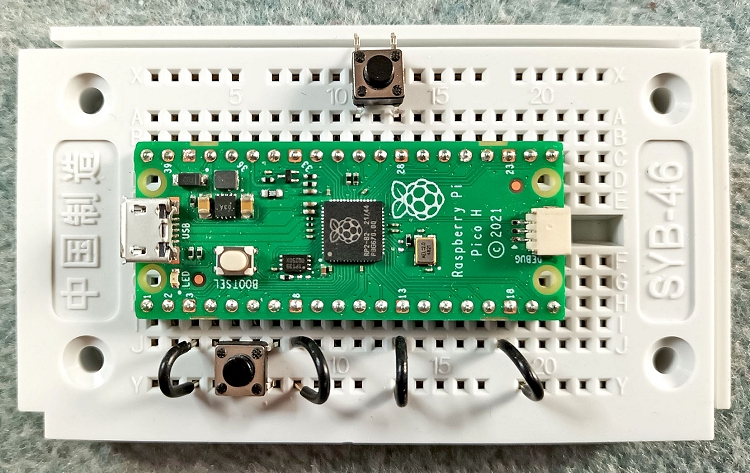
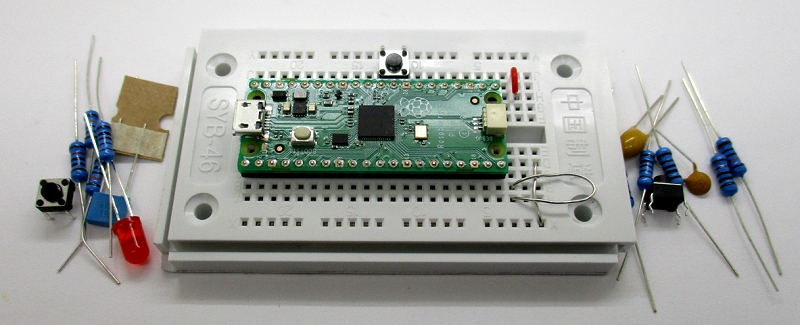
Der im Bild obere Taster steckt nur mit den
beiden unteren Beinchen im Steckbrett und dient lediglich einem Reset
des Pico. Der untere Taster an GPIO2 und 4 gegen GND dient zur
Zeitmessung. Zur besseren Übersicht wurden alle GND-Pinne (3, 8, 13,
18) an Y gelegt.
#kmh.py
from machine import Pin
import time
led = Pin(25, Pin.OUT)
p2 = Pin(2, Pin.IN, Pin.PULL_UP)
p4 = Pin(4, Pin.IN, Pin.PULL_UP)
led.value(0)
while True:
zeit=0
strecke=44.70
while p2.value()==0:
time.sleep(0.1)
zeit=zeit+0.1
if zeit>0:
geschwindigkeit=int(3.6*strecke/zeit)
print (geschwindigkeit," km/h")
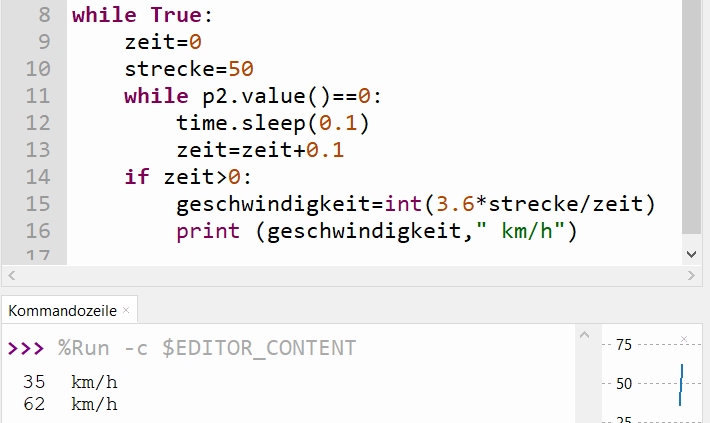
Das Programm wurde mit Thonny getestet. Eine genauere Mesung des Abstands zwischen zwei Kanaldeckeln auf der
Strape ergab 44,70 m. Im Programm musste man den Dezimalpunkt
verwenden: strecke=44.70. Erste Mess-Versuchs-Reihe am offenen
Fenster mit Blick auf die beiden Kanaldeckel in der Tempo-30-Zone vor
unserer Tür mit folgendem Ergebnis: 46, 38, 31, 39, 43, 38. 34,
39, 36, 45, 37, 46, 38, 27, 36, 77 (!), 32, 49 km/h
--> im Schnitt über diese vielleicht
Viertelstunde: 40,61 km/h
Mit OLED-Display
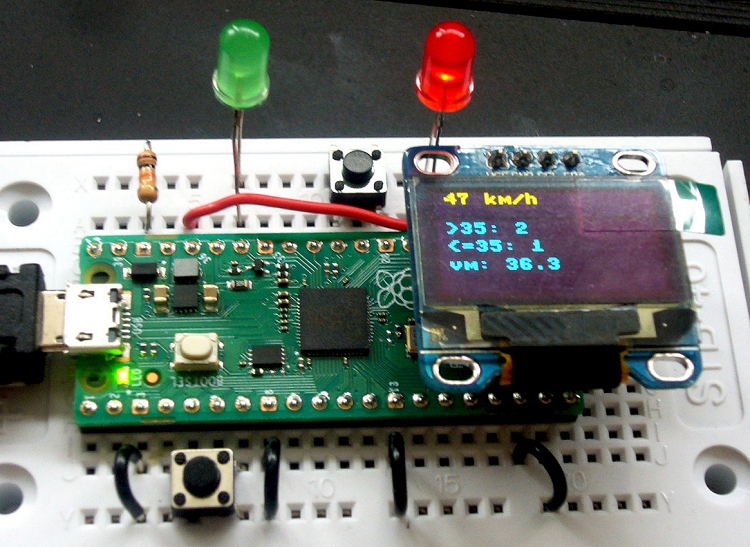
Das Gerät wurde noch einmal verbessert und mit einem OLED-Display
ausgestattet. Achtung, diese Displays haben unterschiedliche
Pin-Belegungen. In diesem Fall konnten GND, SDA und SCL direkt
angeschlossen werden. Nur ein Draht zu VCC war noch erforderlich. Im
Display wird nun auch angezeigt, wie viele Autos zu schnell fahren. Und
es wird die Durchschnittsgeschindigkeit vm berechnet.
#kmhDisplay2.py
from machine import Pin, I2C
import time
from ssd1306 import SSD1306_I2C
led = Pin(25, Pin.OUT)
rot = Pin(20, Pin.OUT)
gruen = Pin(28, Pin.OUT)
p2 = Pin(2, Pin.IN, Pin.PULL_UP)
p4 = Pin(4, Pin.IN, Pin.PULL_UP)
led.value(0)
i2c = I2C(0, scl=Pin(17),sda=Pin(16),freq=100000)
oled = SSD1306_I2C(128,64,i2c)
n30=0
n40=0
summe=0
mittel=0
anzahl=0
txt2=""
txt3=""
txt4=""
while True:
zeit=0
strecke=50
while p2.value()==0:
time.sleep(0.1)
zeit=zeit+0.1
if zeit>1:
v=int(3.6*strecke/zeit)
if v>35:
n40=n40+1
txt2= ">35: "+str(n40)
rot.value(1)
gruen.value(0)
else:
n30=n30+1
txt3= "<=35: "+str(n30)
rot.value(0)
gruen.value(1)
summe=summe+v
anzahl=anzahl+1
mittel=int(summe/anzahl*10)/10
txt4=("vm: "+str(mittel))
txt= str(v) + " km/h"
print (v," km/h")
oled.fill(0)
oled.text(txt,5,0)
oled.text(txt2,5,18)
oled.text(txt3,5,30)
oled.text(txt4,5,42)
oled.show()
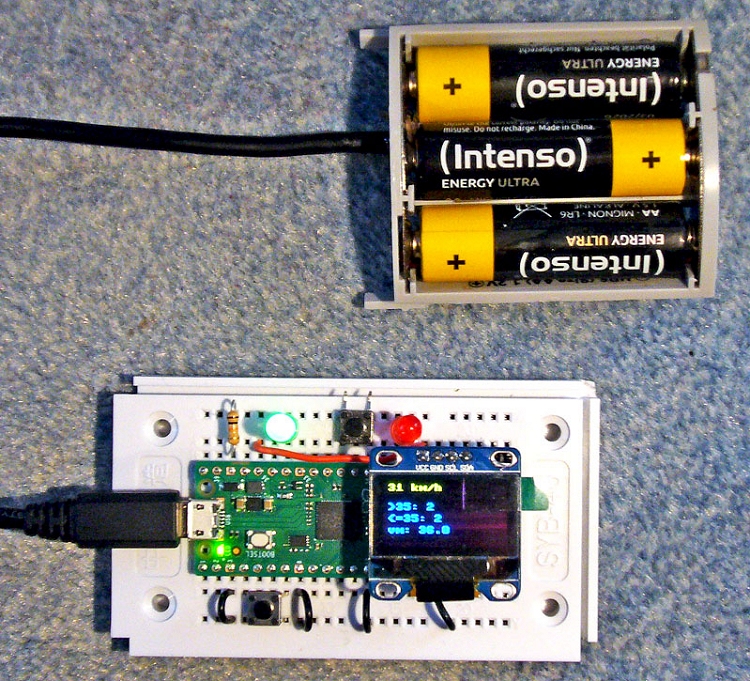
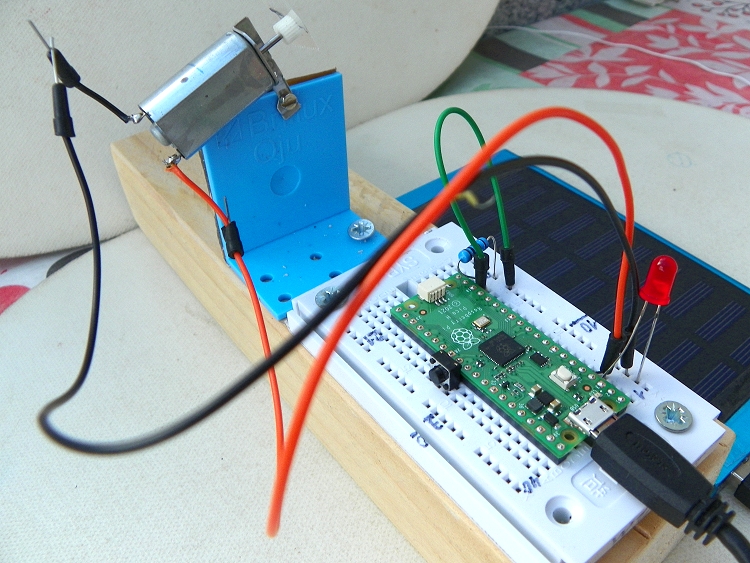
Inzwischen wird das Gerät überwiegend ohne den PC verwendet. Dazu reicht eine einfache Batterieversorgung mit 4,5 V.