
Elektronik-Labor
Projekte
Mikrocontroller
Raspberry
|
LED-Spannung |
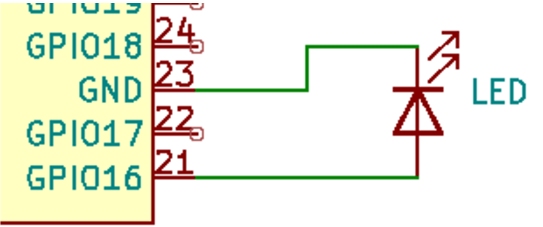
Strom GPIO-LED-GND |
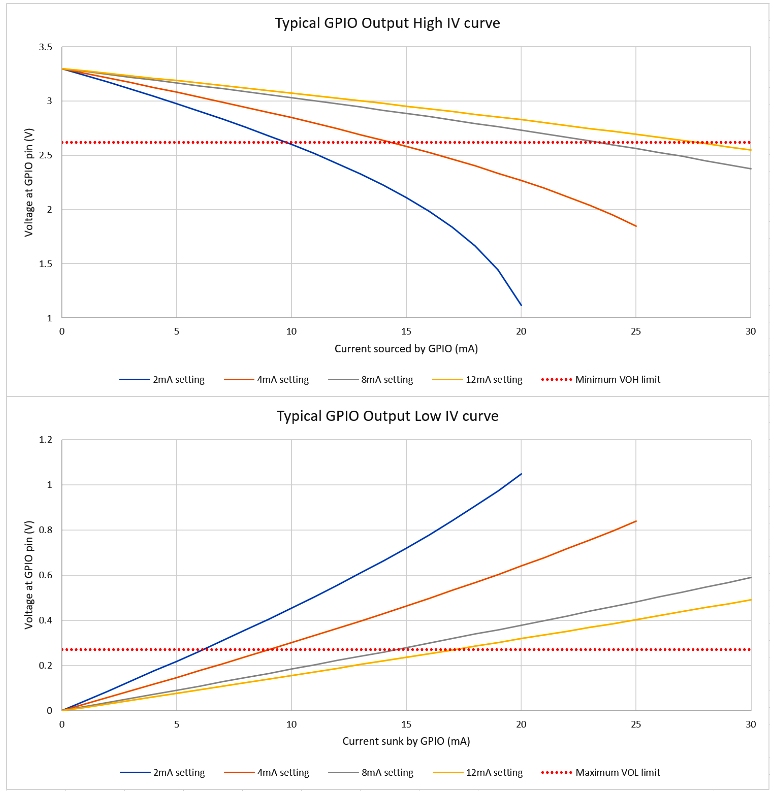
Spannungsabfall 3V3 - GPIO |
|
Entspricht Widerstand |
Einheit |
V |
mA |
V |
|
Ohm |
rot |
1,9 |
23 |
1,4 |
|
61 |
grün |
2,15 |
20 |
1,15 |
|
58 |
gelb |
2,4 |
16,5 |
0,9 |
|
55 |
|
LED-Spannung |
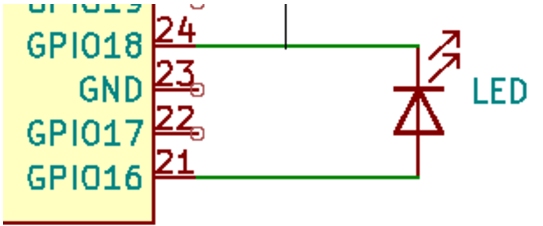
Strom GPIO-LED–GPIO |
Spannungsabfall 3V3 - GPIO |
Spannungsabfall GPIO - GND |
Entspricht Widerstand |
Entspricht Widerstand |
Einheit |
V |
mA |
V |
V |
Ohm |
Ohm |
rot |
1,85 |
17 |
0,9 |
0,55 |
53 |
32 |
grün |
2,15 |
13,5 |
0,7 |
0,45 |
52 |
33 |
gelb |
2,3 |
12 |
0,6 |
0,4 |
50 |
33 |