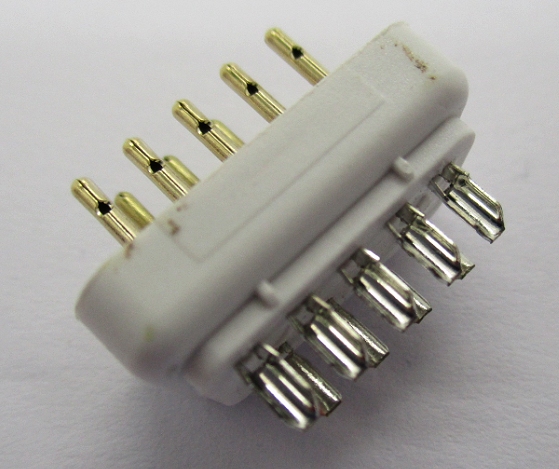
Ein
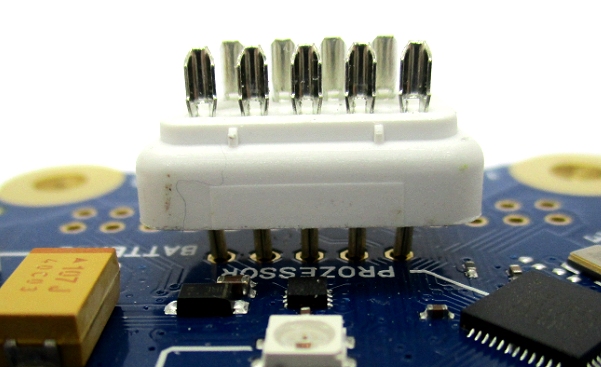
D-SUB-9-Stecker hat in der oberen Reihe 9 Pinne mit einem Durchmesser
von 1 mm. Da müsste man doch eine Lösung für Calliope finden.
Also erstmal den Metallkragen entfernen.
Dann die oberen Pinne absägen (und gut aufheben!).
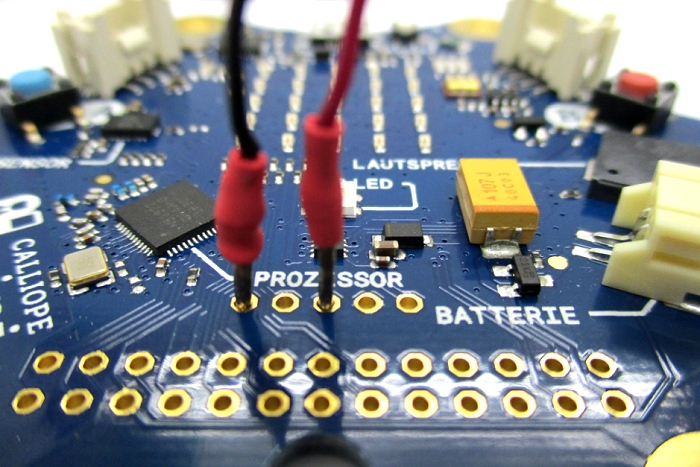
Der
Pinabstand ist geringfügig größer als 2,54 mm. Daraus ergibt sich eine
Federwirkung. Die Pinne sitzen schräg und stamm in der Platine. Nun
kann man oben die Kabel zu den Motoren anlöten. Der Roboter ist nicht
mehr aufzuhalten.
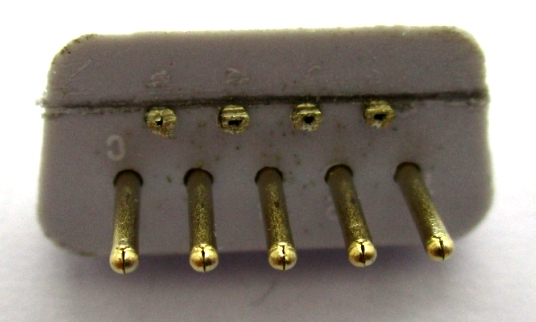
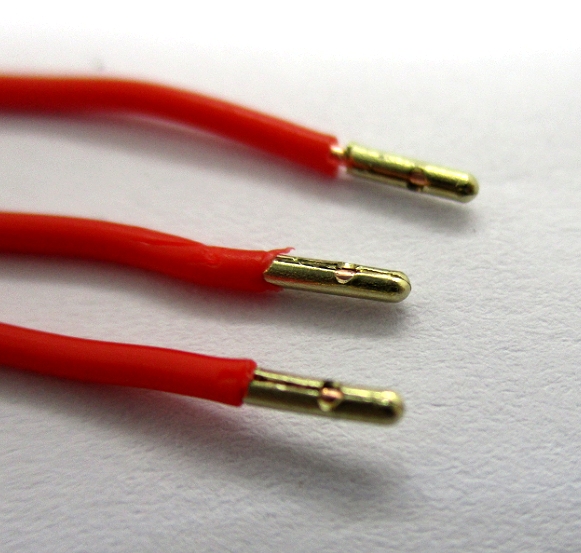
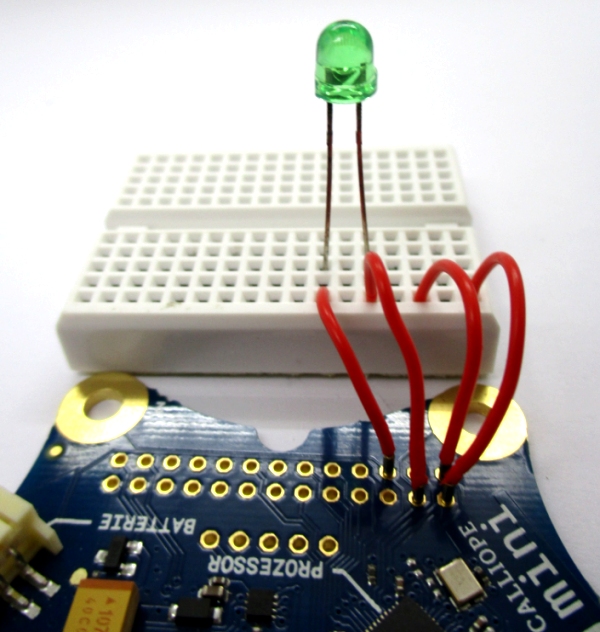
Und
die abgesägten Pinne werden auch noch nützlich. Man kann Kupferdrähte
hineinpressen, die dann sogar ohne Löten festhalten. Durch den Draht im
Inneren wird der Stecker leicht konisch und hält prima in den Löchern.
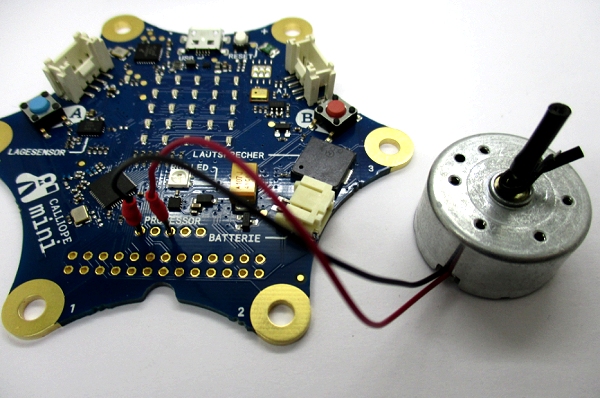
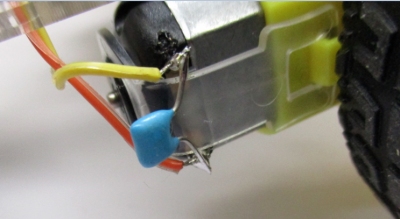
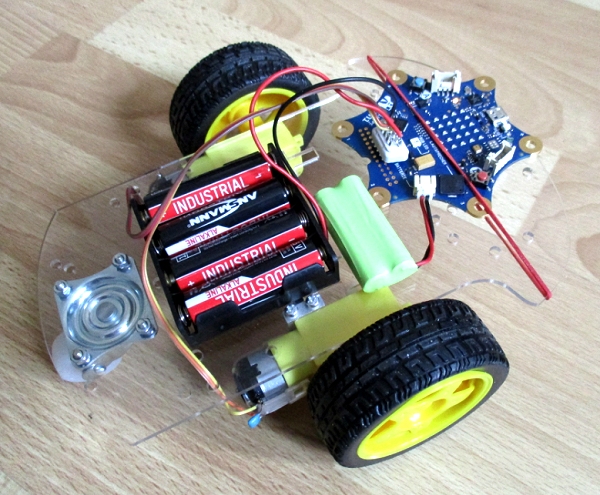
Der Roboter wurde auf einem Chassis von
SainSmart
aufgebaut. Beim praktischen Test zeigte sich eine Schwäche: Der DB9-Pin
in der Mitte sitzt zu locker und hatte prompt Kontaktprobleme. Ich
habe ihn etwas seitlich verbogen, sodass er seine eigene Verspannung
hat. Es gibt nun zwei getrennte Stromversorgungen, 6 V für die
Motoren und 2,4 V aus einem Telefon-NiMh-Akkupack (Siehe Labortagebuch:
Ein zweites Leben für NiMh-Akkus) für den Calliope.
Eine
andere Schwierigkeit waren Funkstörungen durch die Motoren. Das Problem
wurde mit keramischen Kondensatoren von 10 nF parallel zu den Motoren
besiegt. Außerdem sollte der Calliope nicht zu nah bei den Motoren
montiert werden. Die Fernsteuer-Software wurde schon beschrieben:
Calliope7.html Calliope-Kabelstecker selbst gebaut
Calliope-Kabelstecker selbst gebaut