Ein freier Asuro-Bootlader
Ein freier Asuro-Bootlader
Der
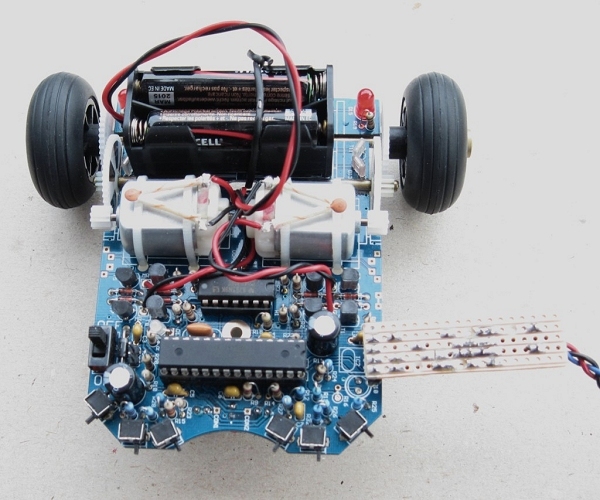
Asuro ist ein kleiner Roboter, der von Mitarbeitern des DLR für
Ausbildungszwecke entwickelt wurde und von der niederländischen
Firma Arexx vertrieben wird.
Ich hatte vor mehreren Jahren von
den Kollegen einen Asuro-Bausatz zum Geburtstag geschenkt bekommen, ihn
zusammengebaut und getestet, aber wurde mit der verwendeten
Programmiersprache C nicht heimisch und hatte die bekannten, auch in
vielen Foren diskutierten Probleme mit dem Flashen des Prozessors per
Infrarot-Übertragung. Der Roboter lag dann einige Jahre in der
Schublade.
Die Probleme sind aber geblieben. Vor einigen Tagen
hervorgekramt, weigerte er sich immer noch, sich flashen zu lassen.
Genervt ersetzte ich die Infrarotstrecke durch eine Drahtverbindung, um
Übertragungsfehler auf der Infrarotstrecke auszuschließen,
aber es tat sich immer noch nichts.
Anschließend versuchte
ich, mit einem ISP-Programmer den AtMega8 anzusprechen, aber auch das
misslang. Sollte der AtMega tot sein? Nun wollte ich auf einen
"frischen" AtMega den Asuro-Bootloader aufspielen. Die Suche auf der
Website des Herstellers war ergebnislos; er möchte lieber
programmierte AtMegas verkaufen.
Man findet zwar einen
alternativen Bootloader, aber der erfordert ein spezielles
Windows-only-Flashprogramm namens OCConsole.exe.
Auf der Suche
nach einem besser geeigneten Ersatz stieß ich dann auf den
kompakten Bootloader "Boofa" von Roland Riegel; da er unter der GPL
steht und der Quelltext verfügbar ist, habe ich ihn ein wenig
anpassen können.
Original-Bootvorgang
Der
proprietäre Asuro-Bootloader benutzt (wie andere Bootloader auch)
die serielle Schnittstelle des Ausuro. Eine Besonderheit ist die
Infrarot-Übertragung. Während der IR-Empfängerchip die
Demodulation der Signale intern vornimmt, so dass der
demodulierte Bitstrom direkt auf den seriellen Eingang des AtMega
gegeben werden kann, muss in Senderichtung ein 36 kHz-Signal erzeugt
werden, auf das der Bitstrom des seriellen Ausgangs aufmoduliert wird.
Beim
Asuro ist das elegant und bauteilsparend gelöst: die IR-Sendediode
hängt mit der Kathode an der TxD-Leitung des AtMega (Pin PD1), die
Anode ist (über R1) mit Pin PB3/OC2 verbunden. Der Bootloader
programmiert zunächst Timer 2 so, dass er ein 36-kHz-Dauersignal an
PB3 ausgibt. Ist TxD in Ruhelage (also low), liegt die IR-Diode mit der
Kathode an Masse und strahlt ein 36 kHz-Signal ab; ist TxD high, wird
eine Lücke in das IR-Signal getastet.
Man könnte also
einen alternativen Bootloader recht einfach Asuro-kompatibel machen. Da
die Infrarot-Hardware bereits abgewrackt und durch eine Steckverbindung
ersetzt war, wollte ich das nicht weiter verfolgen. In früheren
Experimenten mit der Infrarot-Übertragung serieller Signale hatte
ich übrigens die Erfahrung gemacht, dass die direkte
Modulation von ASCII-Signalen recht fehleranfällig ist und durch
Leuchtstoffröhren und Röhrenmonitore leicht aus dem Tritt
gebracht werden kann.
Hardware
An Stelle der IR-Bauteile ist nun eine vierpolige SIL-Fassung in die Asuro-Platine eingelötet.
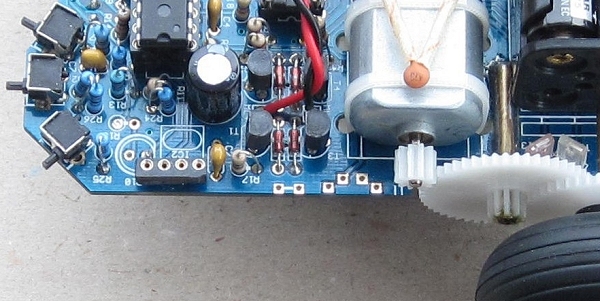
Nach
Auslöten von R1, der IR-Diode und des IR-Empfängers musste
ich zunächst ein kleines Loch so in die Asuro-Platine bohren, dass
der vierte Pol der Fassung durch die Platine hindurchragt, ohne Kontakt
mit der Massefläche zu bilden. Vor dort geht eine kleine
Drahtbrücke zur an TxD liegenden Leiterbahn.
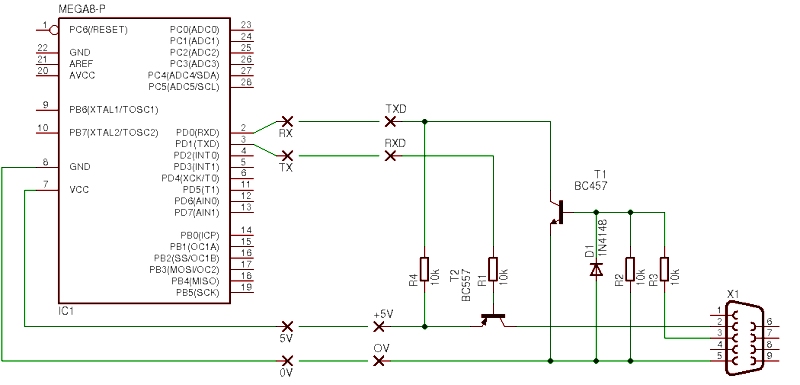
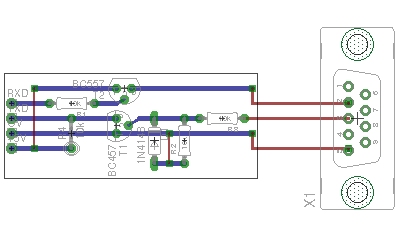
Die
Pegelwandlung von TTL auf RS232-Pegel kann man mit einem (nur zur
Hälfte genutzten) MAX232 vornehmen, zwei Transistoren, vier
Widerstände und eine Diode tun es aber auch. Als Steckverbinder
habe ich eine weitere vierpolige SIL-Fassung verwendet, in die ich
zunächst kurze Drahtstückchen einlötete, die ihrerseits
in die Streifenleitungsplatine eingelötet sind.
Software
Quelloffene
und in Hochsprachen geschriebene Bootloader (z.B. der
Arduino-Bootloader oder der BASCOM-Bootloader) belegen meist 2 kB
Flash. Da der Asuro mit den 8 kB Flash des AtMega8 recht knapp
ausgestattet ist, fiel die Wahl auf den Boofa-Bootloader, der nur 1 kB
belegt.
Allerdings benötigt der Boofa-Bootloader einen
freien Pin (im Originalcode PD6); liegt er bei Einschalten bzw. Reset
des Mikrocontrollers an low, verzweigt der Boofa in die Flash-Routine,
liegt er auf high, wird ein geladenes Programm gestartet.
Da der
Asuro keinen völlig ungenutzten Pin aufweist, habe ich die
Funktion auf PD2 (RxD) verlegt und den Code in der Datei
boofa_config.asm um eine Schleife ergänzt: der Zustand des Pins
wird nicht nur einmal abgefragt, sondern etwa eine Sekunde lang ein
paar tausend mal.
Ist der Asuro über den Pegelwandler mit
einem PC verbunden, liegt sein RxD-Eingang auf High. Startet man
innerhalb der ersten Sekunde nach einem Mikrocontroller-Reset das
Flashprogramm auf dem PC, zieht es mit dem ersten Startbit den
RxD-Eingang auf low und schickt den Bootloader in die Flash-Routine.
Die
serielle Bitrate wurde auf 19200 bit/s reduziert, um die
Übertragungssicherheit zu verbessern. Damit man erkennt, dass der
Asuro im Flash-Modus ist, werden über die Ports PD2 und PB0 beide
Segmente der Duo-LED eingeschaltet, so dass sie gelb leuchtet.
Handhabung
Der Boofa-Bootloader nutzt das avr109-Protokoll. Verwendet man das Kommandozeilentool avrdude, lautet der Aufruf:
avrdude -p m8 -c avr109 -b 19200 -U flash:w:<Programmname.hex>:i
Man kann den Befehl auch in eine Batchdatei schreiben; unter Linux habe ich mir einen Einzeiler namens "asu" angelegt:
avrdude -p m8 -c avr109 -b 19200 -U flash:w:$1.hex>:i
Unter Windows würde asu.bat lauten:
avrdude -p m8 -c avr109 -b 19200 -U flash:w:%1.hex>:i
Man kann dann mit dem Aufruf "asu <Programmname_ohne_hex>" das flashen starten.
Die erforderliche Reihenfolge:
- den Aufruf auf dem PC vorbereiten
- den Ausuro einschalten
- innerhalb einer Sekunde den Programmaufruf durch Drücken der Return-Taste absenden
- die Duo-LED muss dann gelb leuchten
- auch nach Übertragungsende bleibt der Asuro im Flash-Modus
- nach Aus-und Wiedereinschalten und einer Sekunde Wartezeit startet dann das Programm
Vorbereiten des AtMega
Das Bootloader-Programm muss zunächst mit einem ISP-Programmer in den AtMega geflasht werden.
Anschließend
wird der AtMega neu gefust. Das Fusebyte für die lfuse lautet CF
(es aktiviert den Keramikresonator-Modus), das Fusebyte für die
hfuse lautet C2 (es setzt die Bootsektorgröße auf 1 kByte
bzw. 512 Worte und "verbiegt" den Startvektor so, dass er auf den
Bootloader zeigt.
Mit avrdude und einem SP12-Programmer lautet der Aufruf:
avrdude -m8-c sp12 -U lfuse:w:0xcf:m hfuse:w:0xc2:m
Download: boofa-soft-20120507.zip