
Roboter Adventskalender
Vorwort
In unserer technisierten Welt werden Roboter immer wichtiger. Die meisten Roboter sehen zwar ganz anders aus als man sie sich mal vorgestellt hat. Aber in vielen Bereichen der Industrie übernehmen sie heute schon einen großen Teil der Arbeit. Und in Zukunft werden es immer mehr, und sie werden auch im privaten Umfeld zu finden sein.
Da ist es sinnvoll, sich selbst einmal spielerisch mit dem Bau einfacher Roboter zu beschäftigen. Das Ergebnis wird zwar weit hinter einem heutigen Industrieroboter zurück bleiben. Aber einige grundlegende Prinzipien der Robotersteuerung werden deutlich, und man erkennt auch mögliche Probleme und Gefahren. Außerdem ist die eigene kreative Beschäftigung mit der Technik immer ein Gewinn, denn die neuen Erfahrungen und Kenntnisse können auch in ganz andern Bereichen nützlich werden.
Wir wüschen viel Freude und guten Erfolg!
1 Motor und Getriebe
Motor
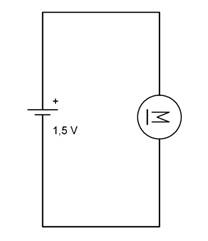
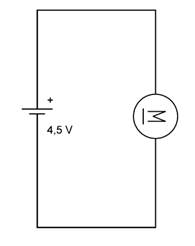
Hinter dem ersten Türchen des Kalenders kommt ein Getriebemotor zum Vorschein. Für den Betrieb braucht man in den folgenden Versuchen drei AA-Zellen mit je 1,5 V, die nicht im Kalender enthalten sind. Für einen ersten Test reicht eine einzelne Zelle. Wenn man die Anschlusskabel des Motors an beide Pole der Batterie hält, beginnt er zu laufen. Man hört ein Summen, und die Achse des Getriebes dreht sich langsam.
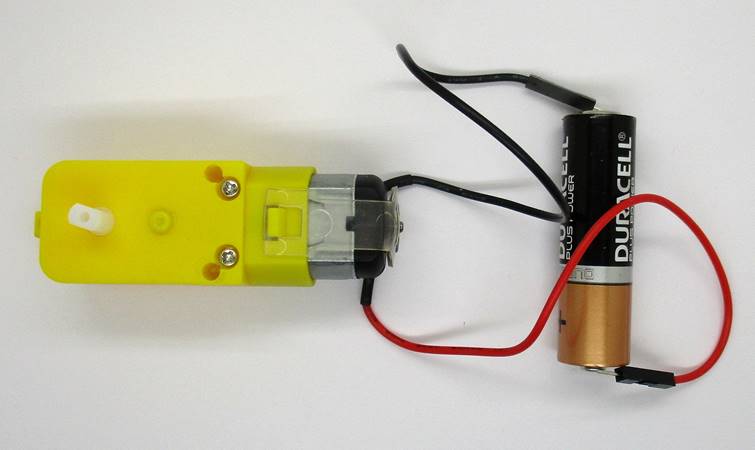
Wie bei jedem Gleichstrommotor kann man die Drehrichtung ändern, indem man die Pole der Batterie vertauscht. Und man kann den Motor schneller laufen lassen, indem man die Spannung erhöht. Mit zwei Zellen in Reihenschaltung und insgesamt 3 V läuft der Motor doppelt so schnell.
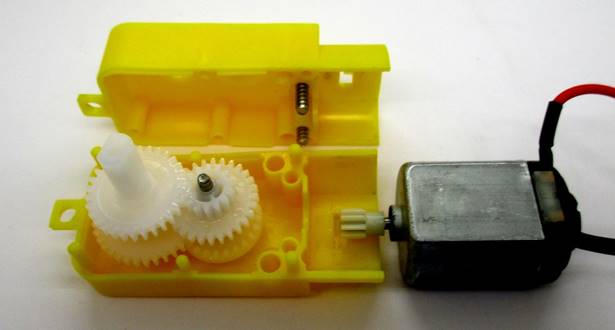
Für einen Blick ins Getriebe muss man das Gehäuse öffnen (Bitte nicht nachmachen!). Insgesamt vier Zahnräder sorgen hier für eine starke Untersetzung. Ein angeschraubtes Rad dreht sich also sehr viel langsamer als die Motorache und zugleich mit dem vielfachen Drehmoment. Es ist deshalb kaum möglich, die Getriebeachse bei laufendem Motor mit bloßen Fingern festzuhalten.
2 Stabile Verbindungen
Steckplatine, Batteriefach mit Schalter
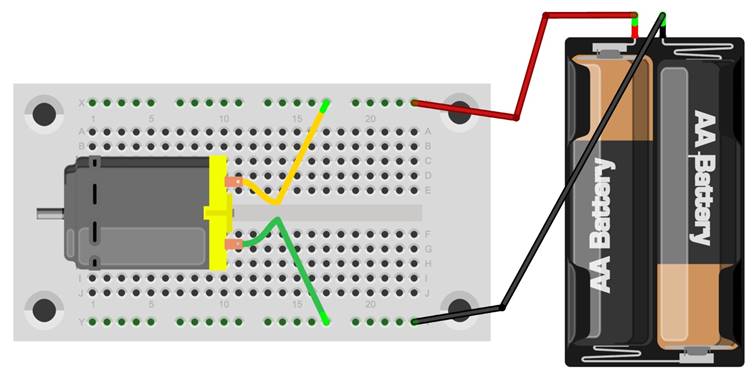
Das zweite Fach liefert ein Batteriefach mit Anschlusskabeln und Schalter sowie eine Steckplatine. Die Steckplatine hat zwei horizontale Kontaktstreifen X und Y, an die der Pluspol (rot) und der Minuspol (schwarz) des Batteriefachs angeschlossen werden sollen. Zusätzlich gibt es 46 vertikale Streifen mit je fünf Kontakten, die den Aufbau größerer Schaltungen erleichtern. Der Motor soll nun an beliebige Kontakte der Versorgungsschienen X und Y angeschlossen werden.
Das Aufbaubild zeigt ein offenes Batteriefach mit zwei AA-Zellen, bei dem auch die inneren Verbindungen sichtbar sind. Das tatsächlich verwendete Batteriefach ist geschlossen und enthält drei Zellen und einen zusätzlichen Schalter. Entscheidend ist die Kennzeichnung der Pole. Der rote Draht ist der Pluspol, der schwarze ist der Minuspol. In allen folgenden Aufbauzeichnungen werden nur noch die Anschlusskabel angedeutet.
Der Motor wird in den Zeichnungen immer ohne Getriebe dargestellt. Das soll aber nicht bedeuten, dass man ihn vom Getriebe trennen soll. Im wirklichen Aufbau verwendet man immer den Motor am Getriebe.
Nach dem Einlegen der drei Batteriezellen kann der Schalter betätigt werden. Mit dem Einschalten läuft der Motor schnell und kräftig. Die Drehrichtung lässt sich durch Vertauschen der Motorkabel ändern. Bei jeder Änderung und nach jedem Versuch soll der Schalter am Batteriefach in Stellung OFF geschoben werden. So schaltet man die Batterie ab und verhindert versehentliche Kurzschlüsse und einen unnötigen Batterieverbrauch.
3 Auf Knopfdruck
Tastschalter + Draht
Hinter dem Türchen Nummer 3 kommen roter Draht und ein Tastschalter zum Vorschein. Der Taster hat vier Anschlüsse, von denen je zwei in Längsrichtung leitend verbunden sind. Im Inneren gibt es ein gebogenes Blech, das beide Zeiten verbindet, wenn es bei einem ausreichenden Druck umklappt. Mit dem Taster kann der Motor nun gestartet und angehalten werden.
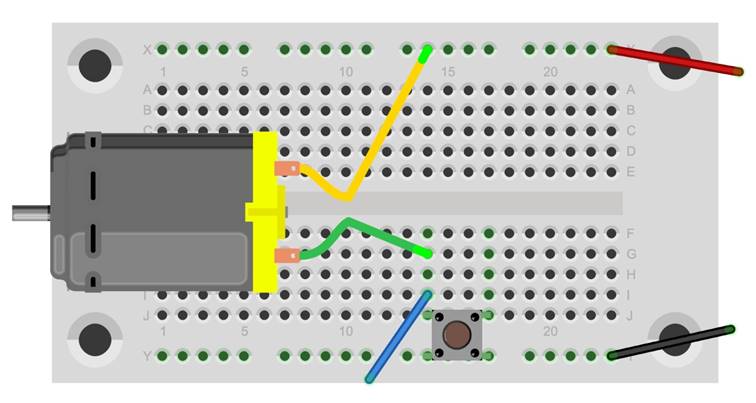
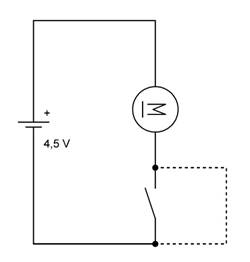
Mit einem Draht kann der Motor auch durchgehend laufen. Dazu soll ein Stück Draht von 3 cm Länge abgeschnitten werden, das an beiden Enden auf einer Länge von 5 mm von der Isolierung befreit wird. In der Aufbauzeichnung ist nur ein Ende eingesteckt. Wenn man aber das freie Ende mit der Minusleitung (Y) verbindet, wird der Tastschalter überbrückt
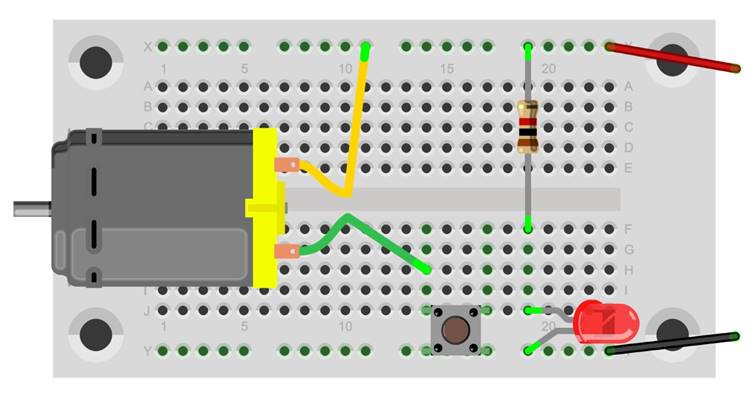
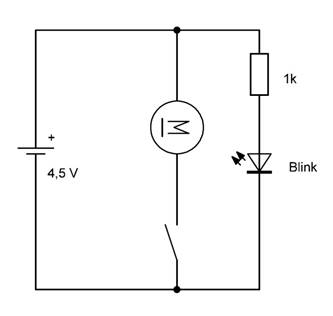
4 Rotes Blinklicht
Rote Blink-LED + Widerstand 1 k
Heute liefert der Kalender eine rote LED und einen Widerstand mit einem Kiloohm (1 kΩ, Braun, Schwarz, Rot). Beim ersten Einschalten wird sichtbar, dass es sich um eine besondere LED handelt, nämlich eine automatische Blink-LED. LEDs haben unterschiedlich lange Anschlussdrähte. Der kürzere Draht ist der Minuspol (Kathode), der längere der Pluspol (Anode). Zusätzlich hat der Minuspol eine abgeflachte Seite am unteren Kragen des Gehäuses.
Achtung, eine LED benötigt grundsätzlich einen Vorwiderstand, der dafür sorgt, dass der erlaubte Strom nicht überschritten wird. Das gilt auch für die Blink-LED. Der Widerstand bestimmt, mit welchem Strom und mit welcher Helligkeit die LED betrieben wird. Eine direkte Verbindung ohne Widerstand kann die LED zerstören. Die LED hält eine Stromstärke bis zu 20 Milliampere (20 mA) aus. Mit dem Widerstand von 1 kΩ fließt ein Strom von weniger als 3 mA.
Mit dem Einschalten der Batterie blinkt die rote LED. Fast jeder Industrieroboter und jedes autonome Fahrzeug hat eine solche Warnblinklampe. Das ist ganz wichtig zur Unfallverhütung. Deshalb wird hier auf dem Weg zu einem funktionierenden Roboter die Blink-LED eingeführt.
Der Motor läuft erst, wenn man auf den Taster drückt. In den meisten Fällen hört dann aber das Blinken sofort auf. Das liegt als Störungen, die der Motor erzeugt. Kurze Impulse auf der Betriebsspannung stören die Funktion der Blink-LED. Später wird noch eine Methode vorgestellt, die diese Störungen verhindert.
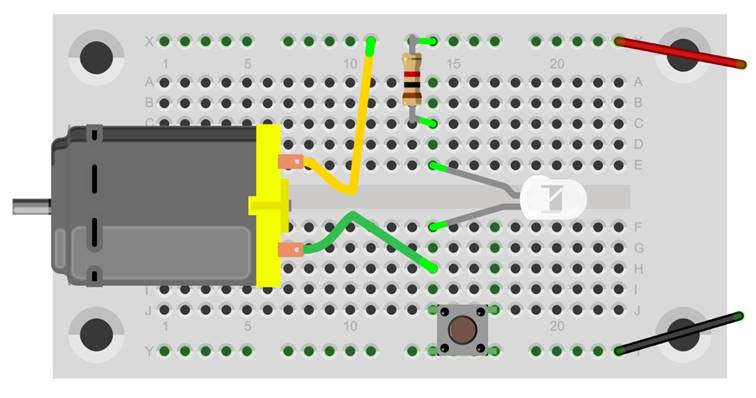
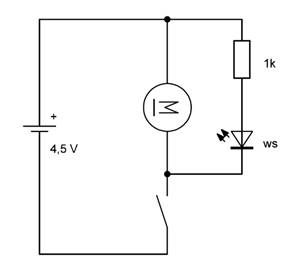
5 Elektrische Beleuchtung
LED weiß
Die weiße LED aus dem fünften Fach wird nun an Stelle der Blink-LED eingesetzt. Sie dient später als Scheinwerfer, damit der Roboter sieht, wo er sich bewegt. Der vorhandene Widerstand mit 1 kΩ sorgt für eine mittlere Helligkeit.
Ein kleiner Zusatzversuch zeigt, dass der Motor auch als Generator funktioniert. Dazu schaltet man die Batterie ab und dreht die Getriebeachse. Das erfordert wegen der großen Übersetzung relativ viel Kraft. In einer Drehrichtung passiert nichts, in der anderen Richtung beginnt die LED zu leuchten. Die die LED leuchtet nur bei richtiger Polung der Spannung. Der Motor erzeugt also als Generator elektrische Energie. Diese Eigenschaft des Motors wird oft zur Energierückgewinnung beim Bremsen verwendet.
6 Motoren im Verbund
Motor
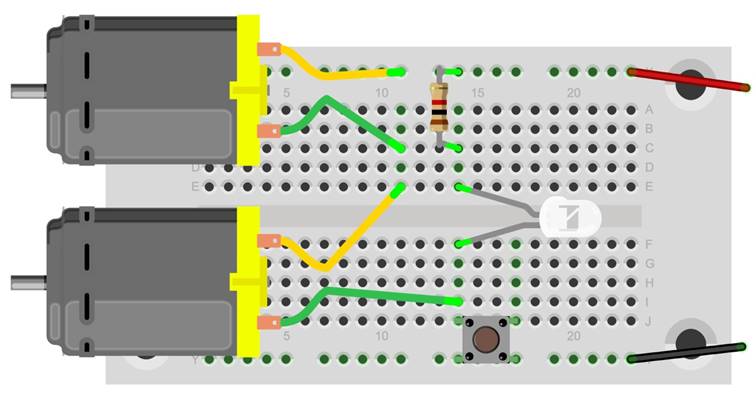
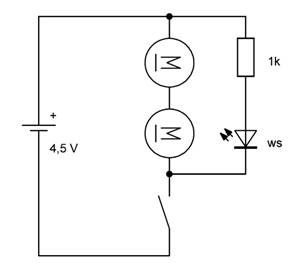
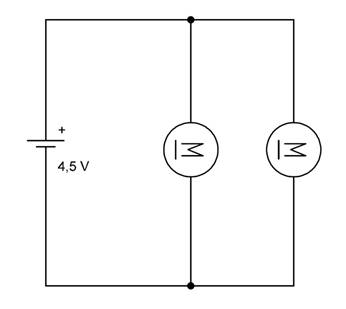
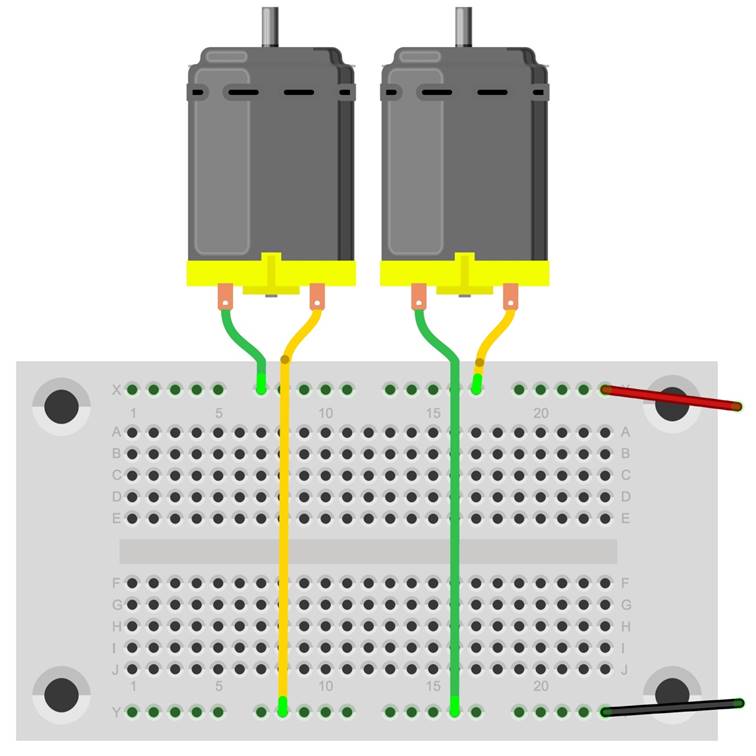
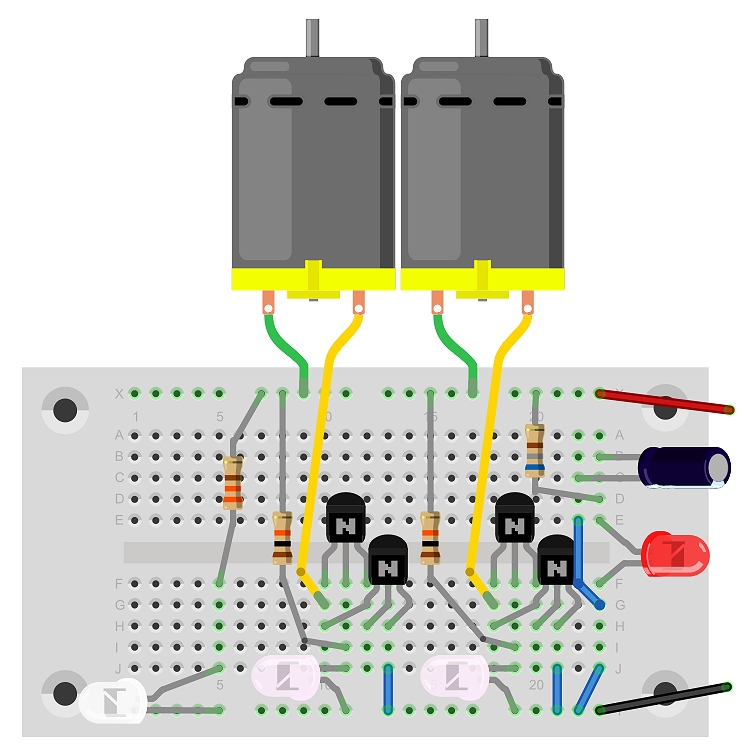
Ein zweiter Motor findet sich im Fach Nr. 6. Er soll in Reihe zum ersten Motor angeschlossen werden. Beide Motoren laufen nun mit halber Spannung und mit halber Drehzahl. Wenn man jedoch einen der Motoren abbremst, wird der andere schneller.
In der Reihenschaltung fließt durch beide Motoren der gleiche Strom. Deshalb liefern beide das gleiche Drehmoment. Das ist vergleichbar mit dem Differentialgetriebe eines Autos. Beide angetriebenen Räder erhalten das gleiche Drehmoment und bringen damit die gleiche Kraft auf die Straße, aber die Drehzahl kann unterschiedlich sein, was die Kurvenfahrt ermöglicht. Im Falle der Elektromotoren haben beide bei gleicher Drehzahl die gleiche Spannung. Jeder erhält die Hälfte der Batteriespannung von rund 4,5 V, also etwa 2,25 V. Wird jedoch ein Motor mit den Fingern abgebremst, sinkt seine Arbeitsspannung. Der andere Motor erhält dann mehr Spannung und dreht sich entsprechend schneller.
Die Motoren benötigen im Leerlauf einen Strom von etwa 100 mA. Bremst man sie ab, sinkt die Drehzahl, und die Stromaufnahme steigt mit dem größeren Drehmoment. Die Batteriespannung bleibt fast unverändert, solange die Batterien noch frisch sind. Bei stark gebrauchten Batterien sinkt jedoch die Spannung mit der Belastung, was man an einer Änderung der LED-Helligkeit erkennen kann.
Wenn ein Motor ganz angehalten wird, läuft der andere Motor mit voller Drehzahl. Lässt man dann die abgebremste Achse los, läuft der stehende Motor meist nicht mehr von allein an. Man kann aber den andern Motor ebenfalls stark abbremsen. Dann steigt der Strom durch die Motoren, sodass auch der erste Motor wieder anläuft. Eine andere Methode ist es, den Taster kurz loszulassen und dann neu zu drücken. Damit starten beide Motoren. Im ersten Moment fließt ein größerer Strom, der dann mit steigender Drehzahl abnimmt.
7 Verstärkter Strom
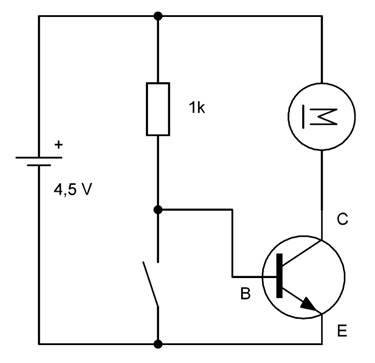
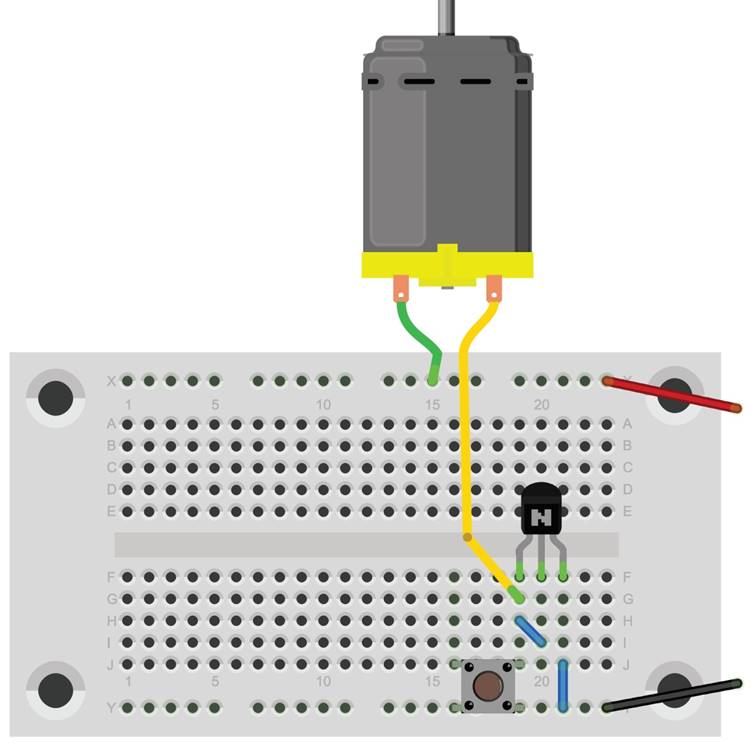
Transistor BC337
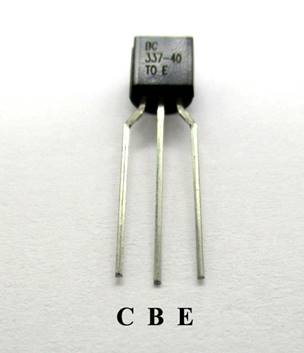
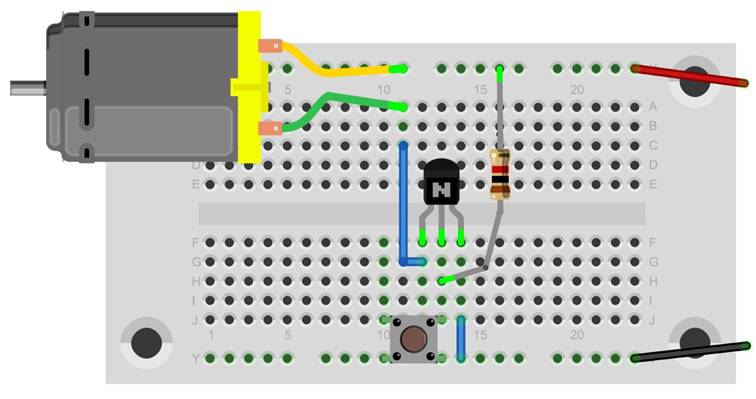
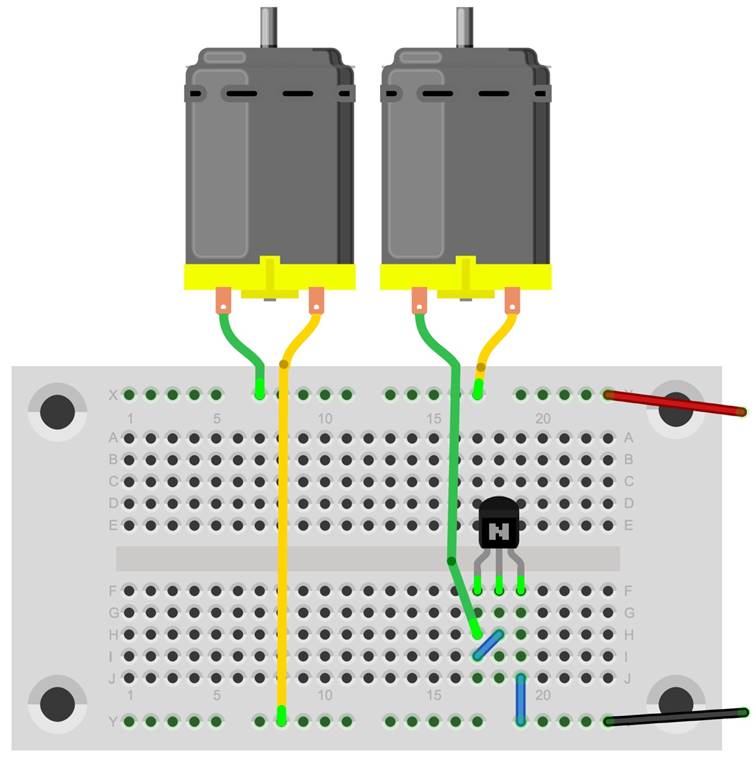
Das Fach Nummer 7 bringt ein Bauteil mit drei Anschlüssen, einen Transistor vom Typ BC337. Ein Transistor ist ein Bauelement zur Stromverstärkung. Er hat drei Anschlüsse: von rechts nach links sind es der Emitter (E), die Basis (B) und der Kollektor (C). Die Anschlüsse dürfen nicht verwechselt werden. Der Emitter ist an Minus angeschlossen. Durch die Basis fließt ein kleiner Strom, durch den Kollektor der verstärkte Strom.
Mit dem Einschalten der Batterie läuft der Motor. Drückt man auf den Taster, bleibt er stehen. Lässt man den Taster los, zieht aber den Widerstand heraus, der bleibt Motor ebenfalls stehen. Durch den Widerstand fließ nur ein kleiner Strom von rund 4 mA. Wenn dieser kleine Strom durch die Basis des Transistors fließt, schaltet dieser einen sehr viel größeren Kollektorstrom ein, der durch den Motor fließt. Bei geschlossenem Tastschalter fließt zwar immer noch Strom durch den Widerstand, aber nicht mehr durch die Basis. Der Kollektorstrom wird damit abgeschaltet.
Der verwendete Transistor BC337 ist gut für diese Aufgabe geeignet, weil er einen großen Stromverstärkungsfaktor hat und relativ viel Strom verträgt. Das Datenblatt verrät die wichtigsten Daten: Maximale Kollektorspannung: 45 V, maximaler Kollektorstrom 800 mA, maximale Verlustleistung: 625 mW, minimaler Stromverstärkungsfaktor: 250.
8 Mit Licht geschaltet
Fototransistor
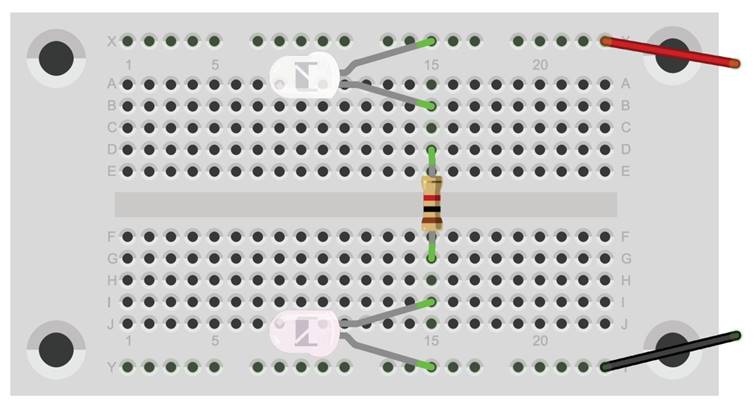
Hinter dem achten Türchen wartet ein Fototransistor. Auf den ersten Blick sieht das Bauteil aus wie eine weiße LED. Wenn man aber genau von vorn schaut, sieht man ein kleines dunkles Rechteck. Das ist die lichtempfindliche Fläche. Der Fototransistor hat nur zwei Anschlüsse, den Kollektor (kurzer Draht) und den Emitter (langer Draht). Es gibt zwar auch eine Basis, aber die hat keinen Anschluss nach außen. Der Basisstrom kommt nämlich durch das einfallende Licht zustande.
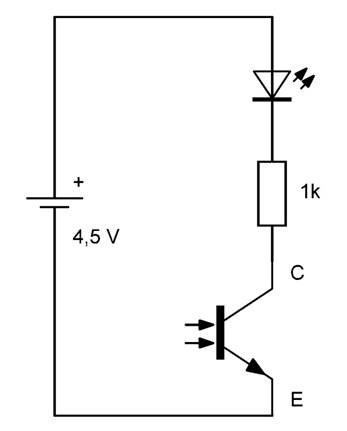
Beim Einbau des Fototransistors liegt der längere Draht am Minuspol, also ganz anders als bei einer LED. Der Kollektorstrom fließt durch den Widerstand und durch die weiße LED. Wenn genügend Licht auf den Fototransistor scheint, ist die LED eingeschaltet. Bei geringem Licht leuchtet sie entsprechend schwächer. Das funktioniert auch noch bei geringem Lichteinfall. Die Schaltung arbeitet deshalb wie ein Lichtverstärker, die weiße LED ist immer mehrfach heller als die Umgebung.
9 Licht schaltet Licht
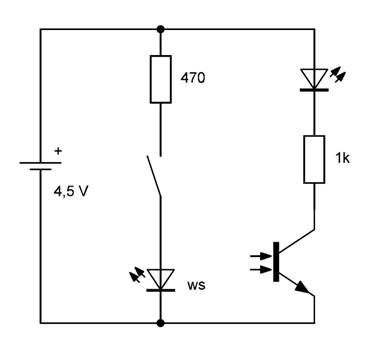
Widerstand 470 Ω
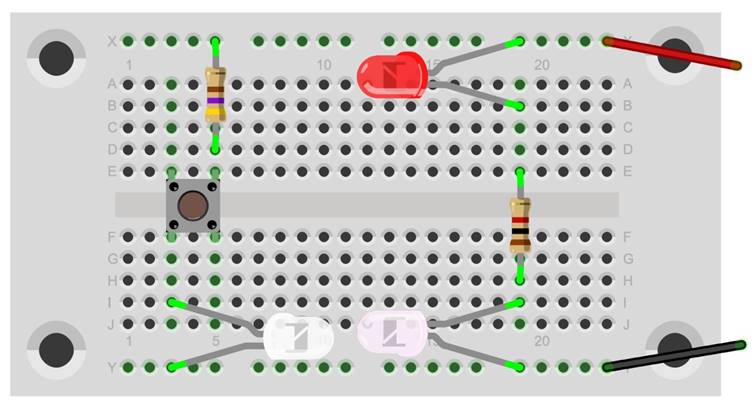
Ein Widerstand mit 470 Ohm (470 Ω, Gelb, Violett, Braun) findet sich im neunten Fach. Damit lassen sich nun zwei unabhängige Stromkreise aufbauen, einer mit der weißen LED und einer mit der roten Blink-LED und dem Fototransistor. Drückt man nun auf den Tastschalter, geht die weiße LED an. Und gleichzeitig beginnt die rote LED zu blinken. Dazu müssen allerdings die weiße LED und der Fototransistor so gebogen werden, dass die weiße LED frontal in den Fototransistor scheint.
Dass die Blink-LED tatsächlich mit Licht geschaltet wird, lässt sich leicht beweisen, indem man ein schwarzes Blatt Papier zwischen die weiße LED und den Fototransistor schiebt. Es schattet das Licht ab und verhindert damit den Stromfluss durch den Fototransistor.
10 Licht schaltet den Motor ein
2 Doppelkabel
Heute liefert der Kalender zwei Doppelkabel mit Steckern und
Buchsen. Sie lassen sich zur flexiblen Verlängerung der LED-Anschlüsse
verwenden. Die weiße LED aus dem letzten Aufbau wird nun mit einem Kabel
ausgestattet, sodass man den kleinen LED-Scheinwerfer hier und da hin richten
kann.
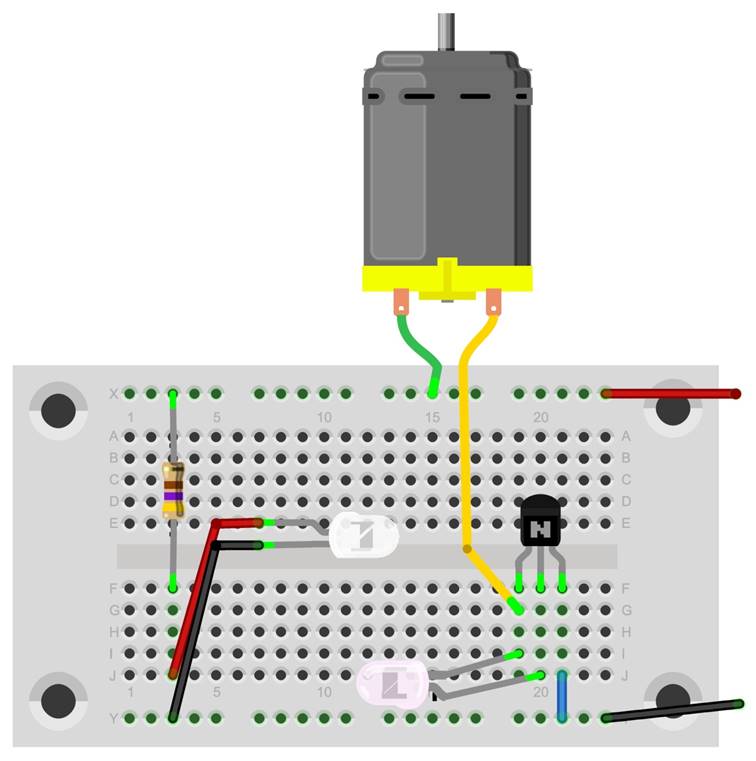
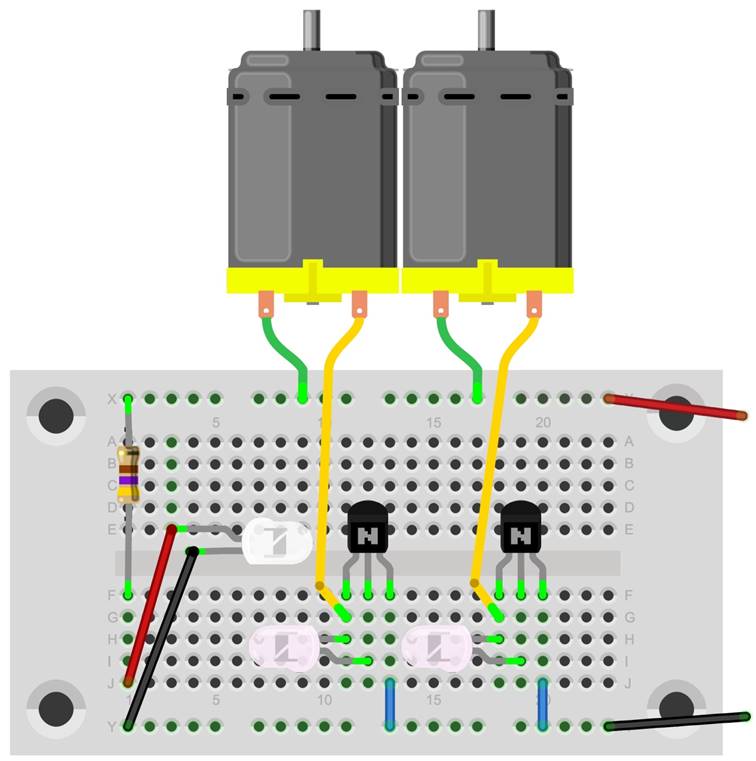
Diesmal soll ein Motor über das Licht gesteuert werden. Der Fototransistor allein liefert nur kleine Ströme, die gerade zum Betrieb einer LED ausreichen. Aber mit einem zusätzlichen Transistor als Verstärker reicht es auch für den Motor. Er bleibt im Ruhezustand stehen und läuft, wenn der Fototransistor direkt angestrahlt wird. Wenn das Licht etwas zur Seite gelenkt wird, kann die Geschwindigkeit reduziert werden. Bei ausreichend hellem Umgebungslicht kann der Motor auch durch eine Abschattung mit der Hand gesteuert werden.
11 Reduzierte Geschwindigkeit
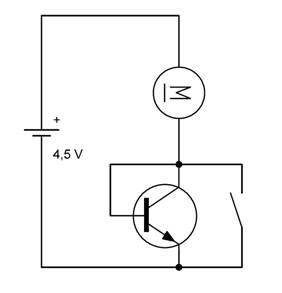
Transistor BC337
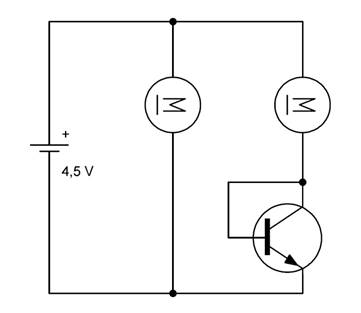
Hinter dem Türchen Nr. 11 kommt ein weiterer Transistor BC337 zum Vorschein. Wie der letzte Versuch schon gezeigt hat, kann ein Transistor den Motor nicht nur ganz einschalten, sondern auch mit reduzierter Drehzahl laufen lassen. Heute soll der Motor mit einer nur leicht verringerten Spannung laufen. Drückt man auf den Schalter, läuft er wieder mit voller Geschwindigkeit. Der Unterschied ist deutlich zu hören.
Bei einer direkten Verbindung von Basis und Kollektor verursacht der Transistor einen Spannungsabfall von etwa 0,8 V. Damit wird die Motorspannung um etwa 20% reduziert. Wenn der Schalter geschlossen wird, gibt es eine direkte Verbindung, und der Motor erhält wieder die volle Spannung. Da nun zwei Transistoren vorhanden sind, kann man die Schaltung auch doppelt aufbauen und zwei Motoren verlangsamt laufen lassen.
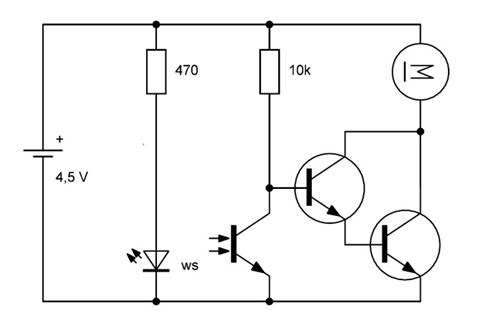
12 Licht schaltet den Motor aus
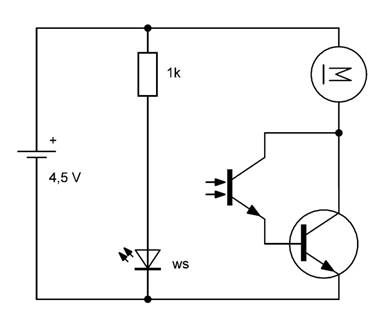
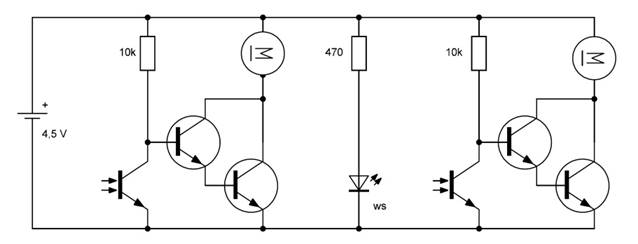
Widerstand 10 kΩ
Das Fach Nummer 12 verbirgt einen Widerstand mit 10 kΩ (Braun, Schwarz Orange). Er wird für eine Schaltung gebraucht, mit der der Motor im Normalzustand läuft, bei Lichteinfall jedoch stoppt. Diesmal werden zwei Transistoren für noch mehr Verstärkung eingesetzt. Durch den Widerstand fließt nur ein kleiner Strom, der hoch genug verstärkt wird um den Motor einzuschalten. Wenn jedoch genügend Licht auf den Fototransistor fällt, wird der Steuerstrom abgeleitet, sodass kein Basisstrom mehr fließt und die Transistoren den Motor abschalten.
Der Versuch kann mit dem LED-Scheinwerfer auf der Platine durchgeführt werden, aber auch mit einer hellen Taschenlampe oder mit hellem Tageslicht. Bei ausreichend großer Helligkeit steht der Motor still und kann durch den Schatten der Hand gestartet werden.
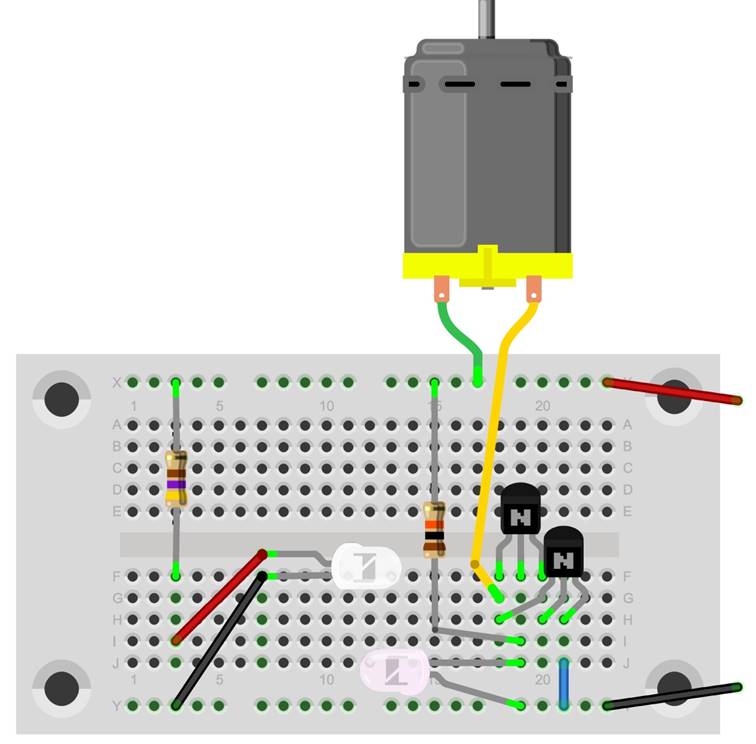
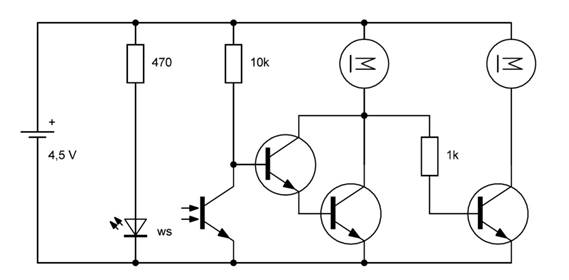
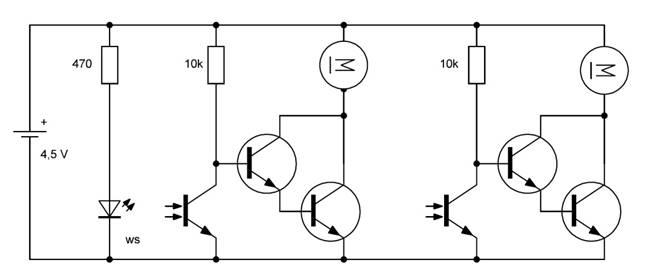
13 Rechts oder links
Transistor BC337
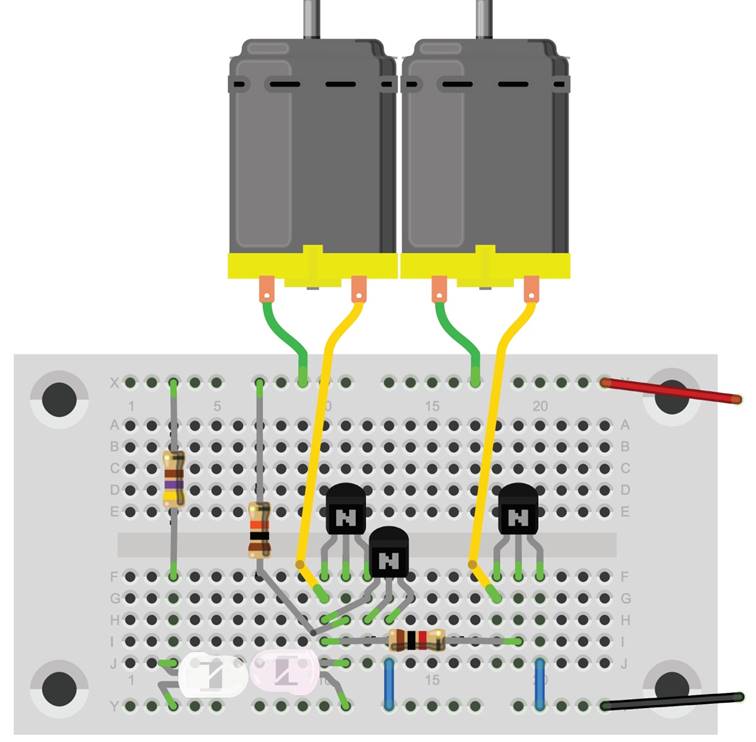
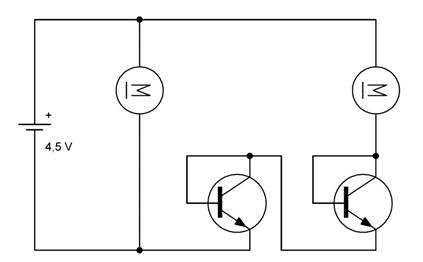
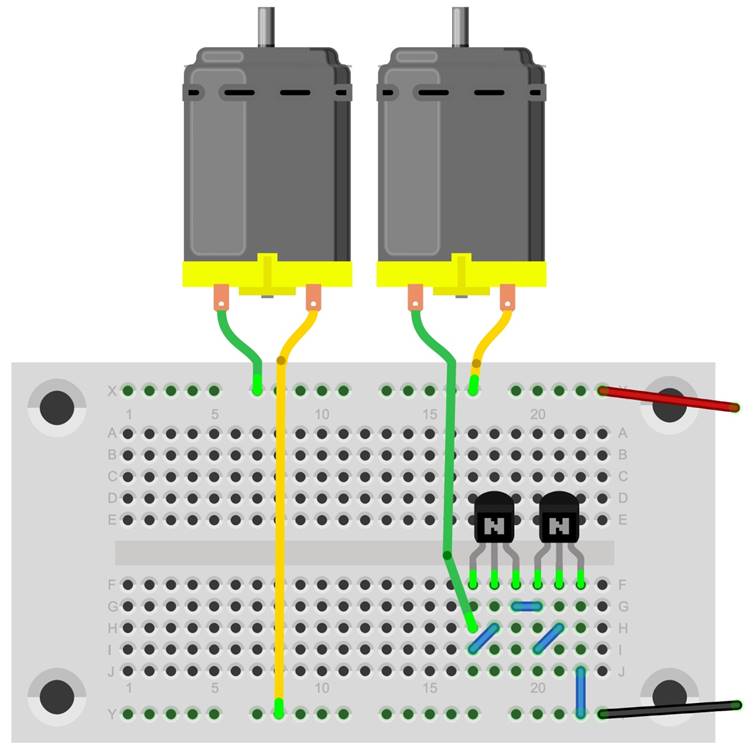
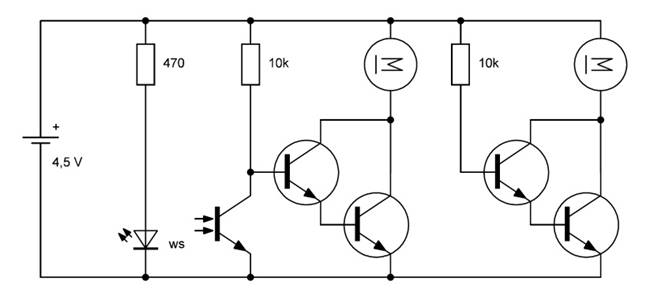
Im dreizehnten Fach kommt ein dritter Transistor BC337 zum Vorschein. Er wird nun für eine weitere Schaltstufe eingesetzt, die den zweiten Motor steuert. Immer wenn der linke Motor läuft soll der rechte Motor stillstehen, und umgekehrt. Der gesamte Versuch kann wieder mit der Lichtquelle gesteuert werden, entweder mit der am Kabel beweglichen LED oder durch Abschattung.
Aus An wird Aus, aus Aus wird An, eine solche Schaltung
nennt man einen Invertierer. Der Basisstrom für den rechten Transistor wird vom
Kollektor des linken Transistors abgeleitet. Immer wenn der linke Motor
eingeschaltet ist, ist die Kollektorspannung klein, sodass kein oder nur sehr
wenig Strom zur Basis des rechten Transistors fließt. Wenn dagegen der linke Motor
abgeschaltet ist, ist die Spannung am Basiswiderstand groß, sodass der rechte
Transistor leitend wird.
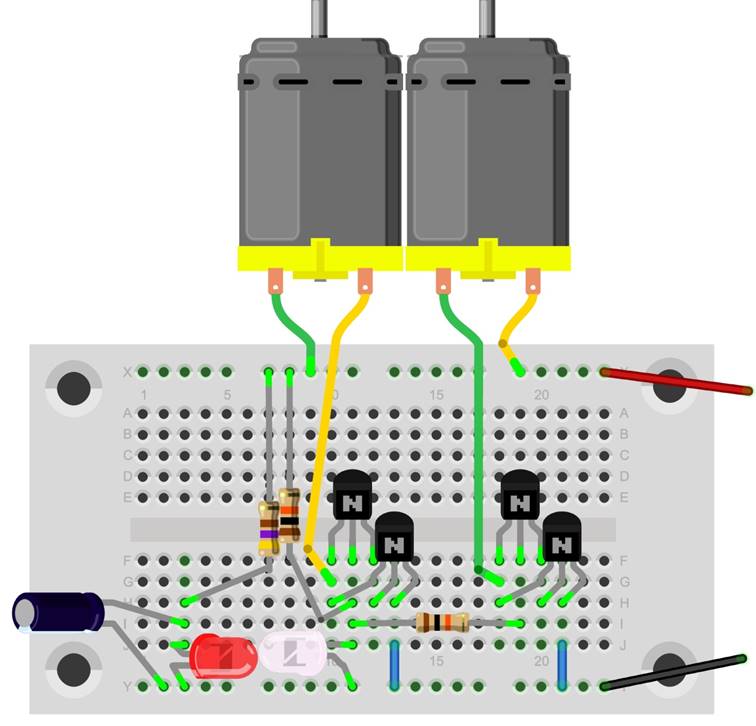
14 Rechts-Links-Lichtsteuerung
Fototransistor
Ein zweiter Fototransistor findet sich im Fach Nummer 14. Damit lassen sich nun beide Motoren unabhängig voneinander steuern. Immer wenn einer der Fototransistoren genügend Licht erhält, wird der zugehörige Motor eingeschaltet. Zur Steuerung kann man die LED am Kabel verwenden oder eine externe Lampe. Mit einer geeigneten Lichtquelle lassen sich auch beide Sensoren gleichzeitig beleuchten, sodass beide Motoren laufen.
15 Montagearbeiten
Schraube und Mutter
Bisher gab es nur Trockenübungen zur Elektronik. Aber jetzt beginnt der Bau eines vollständigen kleinen Roboters. Dazu wird eine 50 mm lange Schraube mit einer M3-Mutter benötigt, die sich im heutigen Kalenderfach findet.
Eine lange Schaube durch das Loch in Höhe der X-Schiene und nahe bei der Lochreihe A soll dann beide Motoren halten. Dazu muss die hintere Schutzfolie der Steckplatine durchstochen werden. Man steckt die Schraube durch beide Getriebeblöcke und die Steckplatine. Wenn die Motoren dann etwas schräg gedreht werden, stehen die Befestigungslaschen an der Radseite fast genau über dem zweiten Befestigungsloch neben der Y-Schiene. In dieser Position sollen sie mit etwas Draht oder einem Kabelbinder fixiert werden.
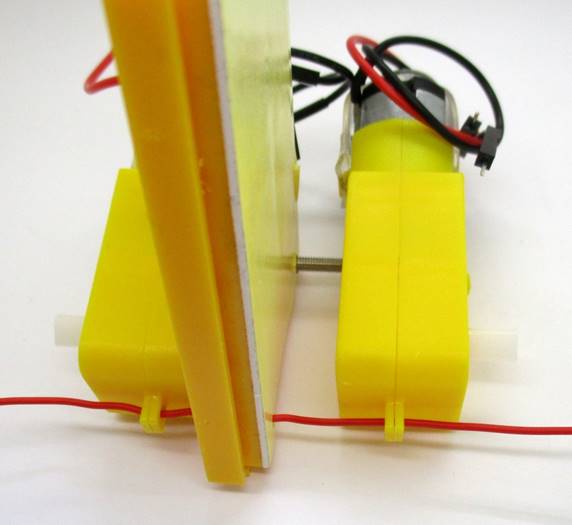
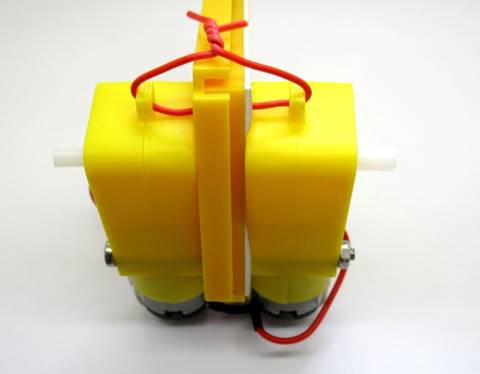
Wenn beide Motoren parallel stehen, kann die Schraube fest angezogen werden, bis die Schutzfolie der Steckplatine sichtbar eingedrückt ist. Am Ende wird der Draht durch beide Getriebelaschen zusammengebunden so weit gespannt, dass die Motoren auf der ganzen Fläche genügend stark anliegen.
Zuletzt muss das Batteriefach an der Rückseite der Steckplatine befestigt werden. Es soll parallel auf dem Motor aufliegen, während die Steckplatine etwas schräg dazu steht. Ein Gummiband oder ein gebundener Draht soll das Batteriefach an der Steckplatine halten. Wenn der Roboter dann aufrecht steht, neigt sich die Platine im späteren Fahrwind etwas nach hinten. Der Roboter nähert sich seinem späteren Erscheinungsbild: Kompakt, kraftvoll und dynamisch.

16 Auf eigenen Rädern
Räder, dicker Draht
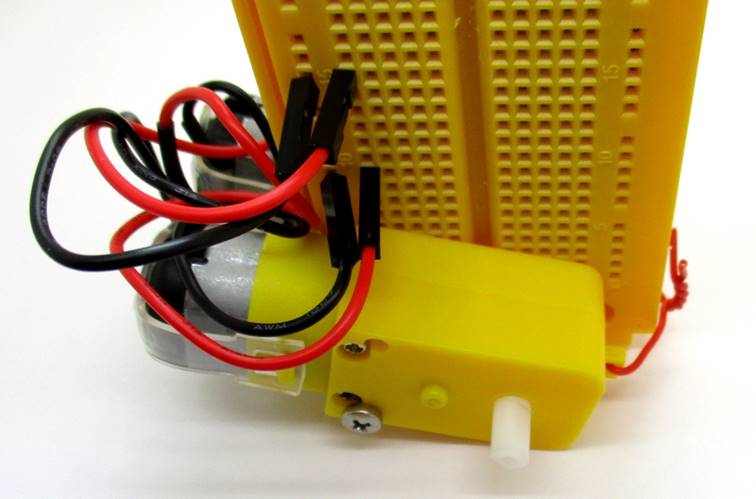
Im Fach Nummer 16 finden sich die Räder, Reifen und Befestigungsschrauben und außerdem ein dickerer Kupferdraht mit Isolierung. Zuerst müssen die Reifen auf die Felgen gesetzt werden. Dann werden die Räder so auf die Achsen gesteckt, dass sie sich nicht mehr verdrehen können. Und am Ende werden die Schrauben eingesetzt, aber nicht zu fest angezogen. Achtung, bei zu starkem Festziehen der Radschrauben drehen die Schrauben durch und halten schlechter.
Wenn der Roboter nun auf seinen Rädern steht, liegen die Motoren am Boden auf. Sie sollen aber etwas höher stehen, wozu man bei den meisten Fahrzeigen zwei weitere Räder verwendet. Es geht aber auch mit nur einem Rad oder noch einfacher mit einer kleinen Kufe, die dann mit möglichst wenig Reibung über den Boden schleift. Eine solche Kufe soll nun aus dem dicken Draht geformt werden. Der Draht wird am Rand zwischen der Steckplatine und dem Motor eingeklemmt. Dazu kann man die Befestigungsschraube der Motoren einmal lösen und am Ende wieder anziehen. Wenn der Draht eingeklemmt ist, soll er zu einem Bogen geformt werden, der so am Boden aufliegt, dass die Motoren parallel zum Untergrund liegen.
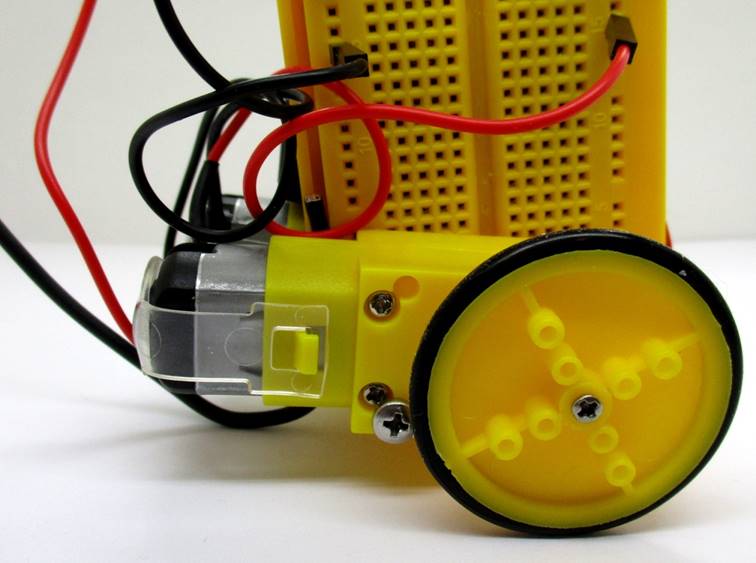
Nun kommt der erste Test: Der Roboter soll einfach geradeaus fahren. Beide Motoren werden also parallel geschaltet. Damit beide Räder sich in die gleiche Richtung drehen, müssen die Kabel unterschiedlich eingesteckt werden. Falls der Roboter rückwärts fährt, müssen die Anschlüsse noch einmal vertauscht werden. Weil beide Motoren meist nicht exakt gleich schnell laufen, wird der Roboter nicht genau geradeaus fahren sondern in einer großen Kurve.
17 Fahren im Kreis
Transistor BC337
Ein weiterer Transistor BC337 kommt heute ins Spiel. Der Transistor wird eingesetzt, um einen der beiden Motoren etwas langsamer laufen zu lassen. Die Schaltung ist schon bekannt: Man schließt Basis und Kollektor kurz und erhält so einen Spannungsabfall von rund 0,8 V. Wenn ein Motor etwas langsamer läuft als der andere, fährt der Roboter einen exakten Kreis.
Der Kreis hat einen Durchmesser von ca. 1 m. Ob im Uhrzeigersinn oder anders herum gefahren wird, hängt davon ab, welcher Motor langsamer läuft. Man kann eine Flasche oder eine Vase genau ins Zentrum der Kreisbahn stellen. Der uneingeweihte Beobachter denkt dann vielleicht, dass hier eine höhere Intelligenz am Werke ist, die entweder permanent den Radius misst oder komplizierte Bahnberechnungen durchführt. Dass es so einfach geht, muss ja nicht jeder wissen.
18 Den Radius ändern
Transistor BC337
Hinter dem Türchen Nr. 18 kommt der vierte Transistor zum Vorschein. Damit lassen sich schon relativ komplexe Aufgaben lösen. Aber heute soll nur der Kreisradius verkleinert werden. Dazu reicht es, einen zweiten Transistor in Reihe zum ersten zu schalten. Nun beträgt der Spannungsabfall rund 1,6 V. Der Kreisradius liegt nun deutlich unter 50 cm.
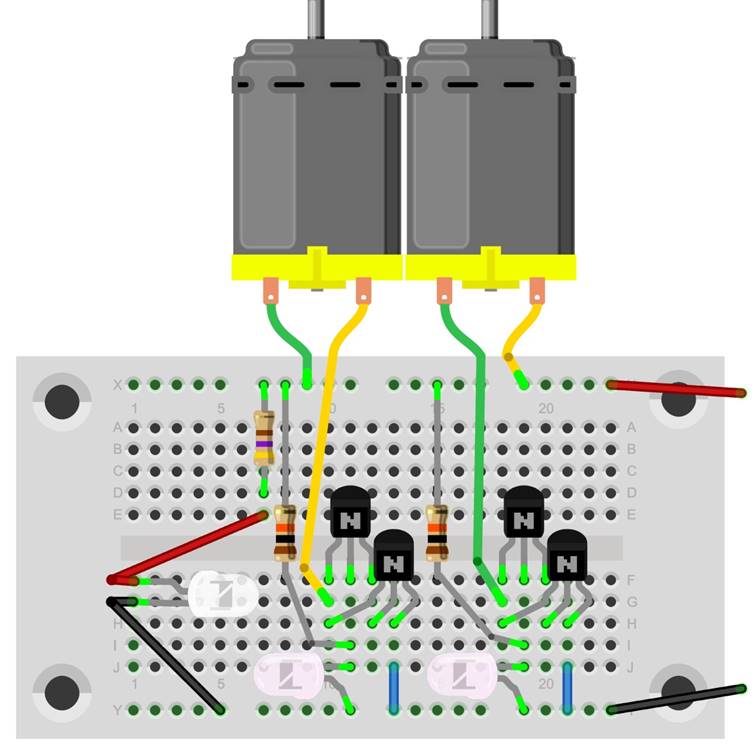
19 Gesteuerte Richtung
Widerstand 10 kΩ
Das Fach Nr. 19 bringt einen weiteren Widerstand mit 10 kΩ (Braun Schwarz, Orange). Damit können nun zwei gleichartige Verstärkerstufen aufgebaut werden, sodass der Roboter im Grundzustand geradeaus fährt. Eine Seite ist jedoch mit einem Fototransistor verbunden, mit dem man den Motor anhalten kann. Bei Beleuchtung wird also eine enge Kurve gefahren.
Der erste Test kann noch mit der weißen LED am Kabel durchgeführt werden. Damit lässt sich auch testen, ob der Roboter bei Beleuchtung nach links oder nach rechts abbiegt. Um die Richtung zu ändern kann man den Fototransistor einfach an die andern Transistoren stecken. Im realen Einsatz auf dem Boden lässt sich der Roboter mit einer Taschenlampe steuern. Immer wenn der Fototransistor getroffen wird, ändert der Roboter die Richtung. Mit etwas Geschick kann damit jeder Ort im Raum erreicht werden. Allerdings muss der Raum eventuell etwas abgedunkelt werden.
Wer die Steuerung noch weiter automatisieren möchte, kann mehrere Lampen im Raum aufstellen um den Roboter eine definierte Stecke fahren zu lassen. Immer wenn er in den Bereich einer Lampe kommt, ändert er die Richtung, bis sich der Fototransistor aus dem Licht gedreht hat. Mit sehr viel Geschick könnte man es sogar erreichen, dass der Roboter mehrfach durch den gleichen Parcours fährt.
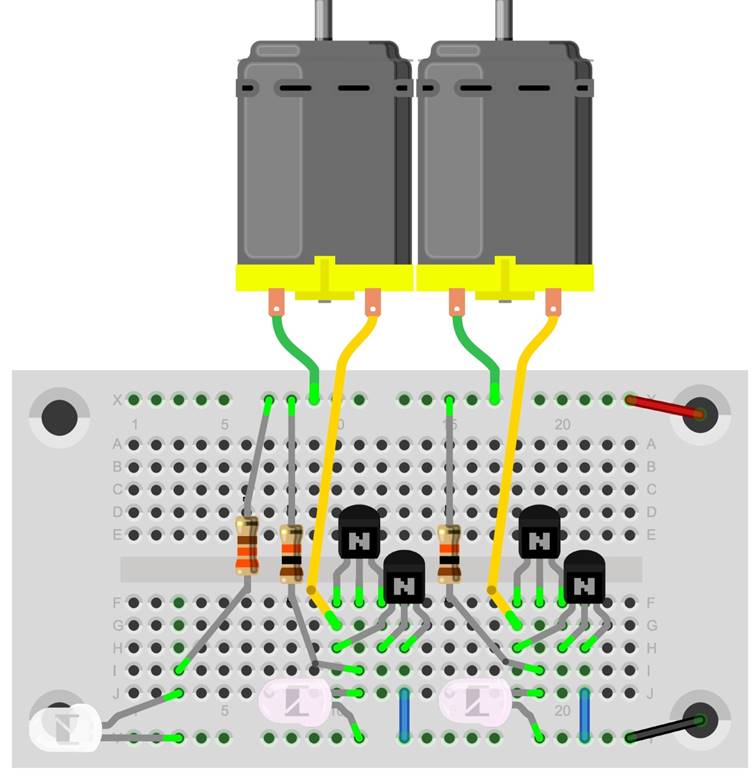
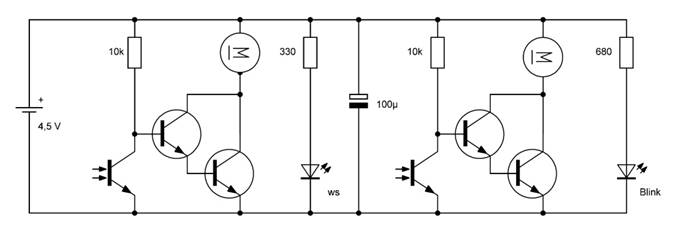
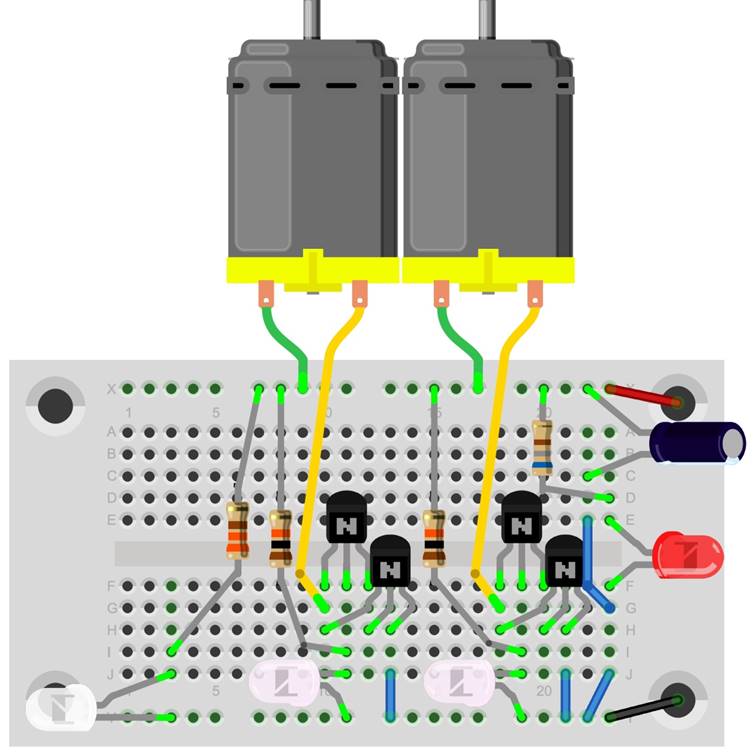
20 Im Watschelgang
Elko mit 100 µF
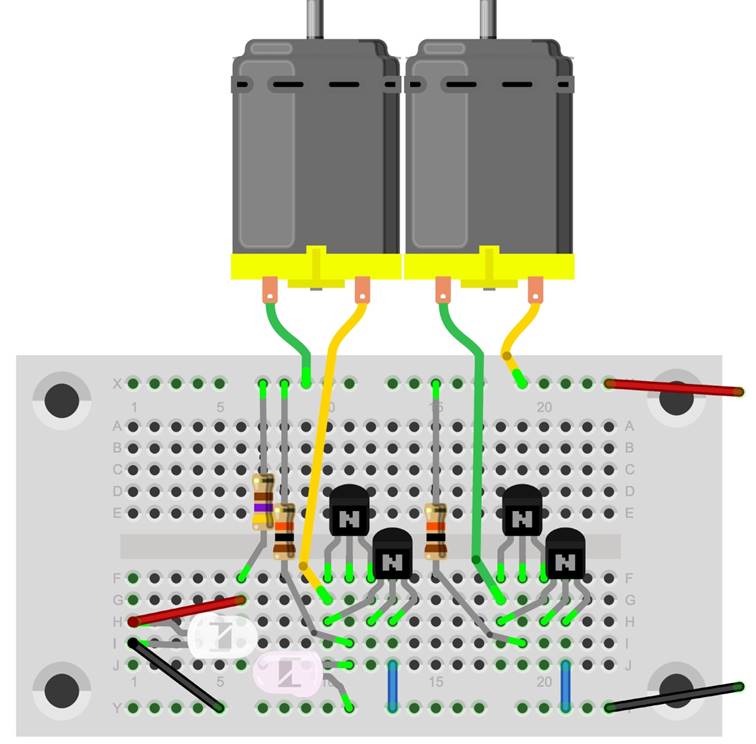
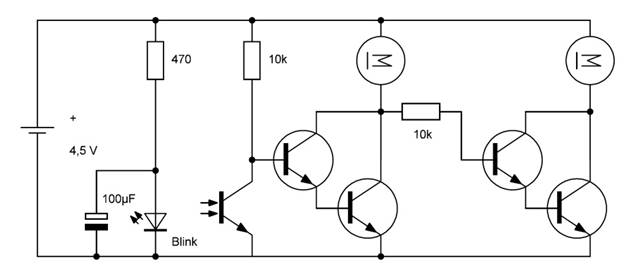
Ein Elektrolytkondensator mit 100 µF findet sich im Fach Nr. 20. Er wird heute gebraucht, um die rote Blink-LED zusammen mit den Motoren zu betreiben. Die Motoren erzeugen nämlich Impulsstörungen, die das gleichmäßige Blinken der LED stören können. Der Kondensator glättet die LED-Spannung und sorgt für eine störungsfreie Funktion. Das ist wichtig, weil die Blink-LED heute zur zentralen Steuerung des Roboters wird, sozusagen zu seinem Gehirn.
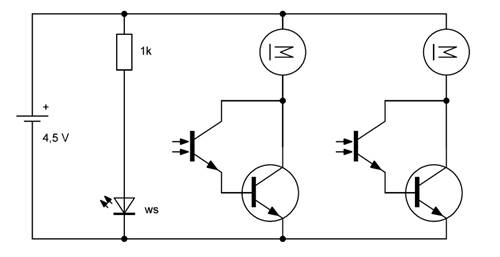
Die LED beleuchtet einen Fototransistor, der den linken Motor abschaltet. Immer wenn der linke Motor steht, läuft der rechte Motor und umgekehrt. Der Roboter bekommt dadurch einen watschelnden Gang ähnlich dem einer Ente. Das ist zwar immer noch keine mentale Höchstleistung, aber es sieht beeindruckend aus. Dabei erreicht das Gehirn des Roboters bei weitem nicht die Leistung einen Entengehirns und kommt nicht einmal an ein Spatzenhirn heran. Da ist noch Platz nach oben!
21 Zweikanal-Lichtsteuerung
2 Doppelkabel
Zwei weitere Doppelkabel mit Steckern und Buchsen finden sich im Fach Nr. 21. Damit können nun auch die Fototransistoren an verlängerten Kabeln eingesetzt werden. Das eröffnet neue Möglichkeiten der Steuerung über Lichtsignale. In den Aufbauzeichnungen werden die Verlängerungskabel nicht eingezeichnet, weil man je nach Versuch auch mit direkt eingesteckten Bauteilen arbeiten kann.
Der Roboter wird nun über zwei Fototransistoren gesteuert, die unabhängig voneinander einen Motor abschalten können. Sie sollen im Folgenden einer schwarzen Linie folgen, die auf dem beiliegenden Karton gedruckt ist. Als vereinfachter Vorversuch eignet sich die direkte Steuerung mit einer Taschenlampe. Man kann gezielt einen der Fototransistoren anleuchten, um die Richtung zu ändern. Oder man beleuchtet beide, um den Roboter zu stoppen.
Für diesen Versuch können beide Fototransistoren wahlweise auf der Platine stecken oder am Ende der Verlängerungskabel. Die Position lässt sich so verändern, dass die Steuerung mit einer Taschenlampe entweder von oben, von der Seite oder von vorn oder hinten möglich wird.
22 Auf der Linie fahren
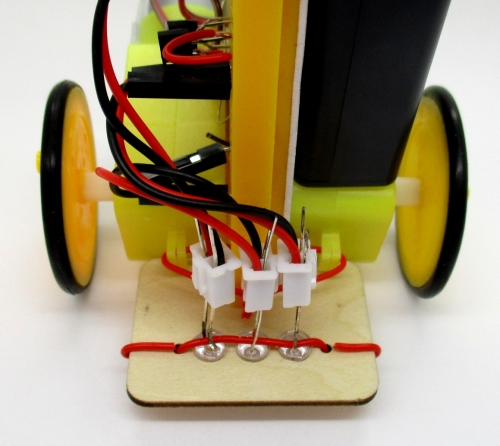
Sensorplatte
Heute erscheint hinter dem Türchen eine kleine Platine mit drei Löchern zur Aufnahme der LED und der Fototransistoren. Sie hat eine passende Aussparung und soll von vorn an den Rand der Steckplatine gesetzt werden. Die LED muss dann in das mittlere Loch gesteckt werden, die Fototransistoren rechts und links daneben. Beide sollen am vorderen Rand des Roboters nach unten schauen und ihn so steuern, dass er genau auf der schwarzen Linie auf dem weißen Karton fährt.
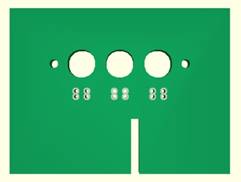
Alle drei Bauteile sollten fest eingepresst werden. Falls nötig, können sie durch einen zusätzlichen Draht gegen ein Herausrutschen gesichert werden, der durch die seitlichen Löcher geführt wird. Die Platine enthält zusätzliche Kontaktpunkte zum alternativen Anlöten der Anschlüsse, die aber normalerweise nicht verwendet werden. Am Ende werden die Verlängerungskabel aufgesteckt, und zwar so, dass jeweils der schwarze Draht an Minus kommt, also am kurzen Draht der LED und an den langen Drähten der Fototransistoren.
Für eine optimale Funktion müssen die LED und die Fototransistoren
in möglichst geringem Abstand (etwa 1…3 mm) über dem Boden schweben. Dazu muss
man den Roboter etwas nach vorn neigen, indem man die Kufe am hinteren Ende größer
biegt. Die weiße LED erzeugt einen runden Lichtfleck, der geringfügig kleiner ist
als die schwarze Linie. Wenn die LED mittig über dem schwarzen Streifen
schwebt, wird das Licht verschluckt und kommt nicht bei den Fototransistoren an.
Wenn es aber eine Abweichung gibt, fällt etwas Licht auf die weiße Fläche und
wird von da gestreut. Der Fototransistor auf der entsprechenden Seite empfängt
das Licht und schaltet Motor auf der anderen Seite ab, sodass die Richtung
korrigiert wird. Falls sie Fototransistoren vertauscht anschlossen sind, wird
die Bahn ganz verlassen.
Wenn alles korrekt aufgebaut und eingestellt ist, sollte der Roboter in der Lage sein, von allein der schwarzen Linie zu folgen. Die Bewegungen sind ruckartig, und bei nicht ganz optimaler Einstellung oder zu hellem Umgebungslicht kann es passieren, dass der Roboter aus der Bahn springt. Aber dann bleibt er automatisch stehen, weil beide Fototransistoren Licht erhalten. Es ist also ausgeschlossen, dass er einen falschen Weg nimmt. Das Verhalten entspricht damit dem ersten Robotergesetz von Asimov: Ein Roboter darf niemals einen Menschen verletzen oder in Gefahr bringen.
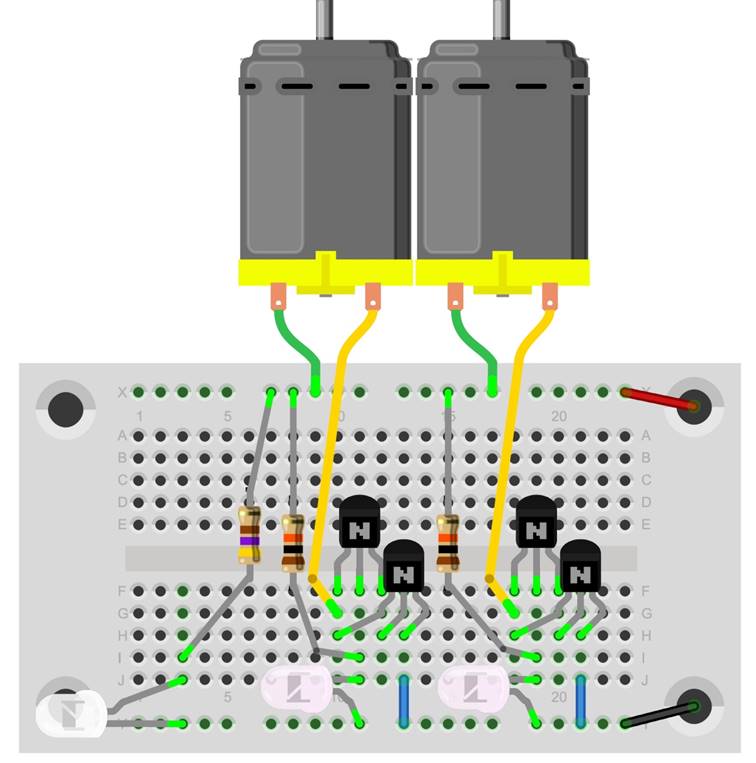
Die Aufbauzeichnung zeigt die Sensoren nicht an ihren Verlängerungskabeln, sondern in der Position, wo sie schließlich angeschlossen werden. Man denke sich ihre Anschlüsse verlängert, sodass sie in die Löcher der Sensorplatte passen. Und nicht vergessen: Der linke Fototransistor gehört zum rechten Motor und umgekehrt.
23 Mehr Licht
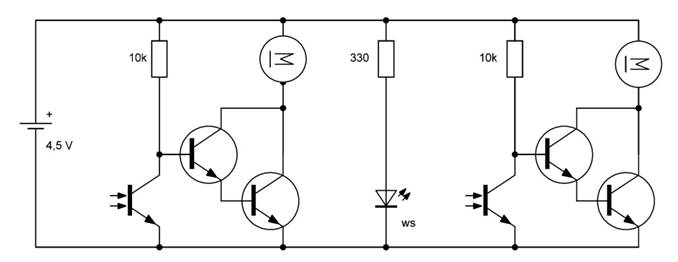
Widerstand 330 Ω
Heute kommen zwei Fähnchen und ein weiterer Widerstand zum Vorschein. Der Widerstand hat 330 Ω (Orange, Orange, Braun) und kann den bisher verwendeten Vorwiderstand von 470 Ω der weißen LED ersetzen. Die LED wird damit etwas heller. Man kann testen, mit welchem von beiden Widerständen die Steuerung zuverlässiger funktioniert. Das hängt auch von der Umgebungshelligkeit ab.
Da nun fast alles fertig ist, sollte der Roboter Flagge zeigen! Deshalb gehört eine der vorbereiteten Fahnen an den überstehenden Draht der Schleifkufe. Man verwendet entweder die fertig bedruckte oder eine selbst gemalte Fahne. Zur Befestigung eignet sich Klebstoff oder ein Klebeband.
24 Fahrstrecken
Widerstand 680 Ω
Hinter dem letzten Türchen des Kalenders findet ein kleiner Zettel mit einem Download-Link für eine größere Fahrstrecke zum Selber-Ausdrucken und außerdem ein Widerstand mit 680 Ω (Blau, Grau, Braun). Er kann als Vorwiderstand für die weiße LED eingesetzt werden, um eine weitere Variante der Helligkeitseinstellung zu testen, oder wahlweise auch als Vorwiderstand für die rote Blink-LED. Sie wird als letzte Änderung mit eingebaut, damit der Roboter im Betrieb auf sich aufmerksam macht. Das entspricht nämlich den allgemeinen Roboter-Verkehrsregeln und soll Unfälle vermeiden helfen.
Damit kann der Roboter auch größere Strecken auf dem selbst ausgedruckten Parcours oder in der ganzen Wohnung zurücklegen. Dazu muss man nur eine Papierbahn mit einer schwarzen Linie auslegen. Wer weiß, vielleicht kann er sich dann nützlich machen und kurze geschriebene Nachrichten oder kleine Geschenke (Diamantringe und dergleichen) überbringen.
Ganz wichtig ist aber auch der Schalter auf dem Batteriekasten. Jeder Mensch, der seinen Lebensraum mit einem Roboter teilt, muss in den Gebrauch des Hauptschalters eingewiesen werden und jederzeit in der Lage sein, den Roboter abzuschalten. Die Mütter sollen es ihren Söhnen erklären und die Väter ihren Töchtern, damit nicht eines Tages die Ängste unserer schlimmsten Filme wahr werden, dass nämlich die Roboter die Macht übernehmen.
Einige der Blink-LEDs reagieren besonders empfindlich auf die Motoren und gehen dann in ein Dauerleuchten über. Man kann das so lassen und hat dann eine andere Bedeutung. Wenn die LED durchgehend leuchtet, ist der Roboter in Bewegung. Wenn sie blinkt, steht er. Wenn man aber auf ein permanentes Blinken Wert legt, kann die Schaltung etwas umgebaut werden. Der Elko liegt jetzt nicht mehr parallel zur Betriebsspannung, sondern parallel zur Blink-LED. Damit ist sie besser entstört, weil ihr Vorwiderstand und der Elko ein Tiefpassfilter bilden.
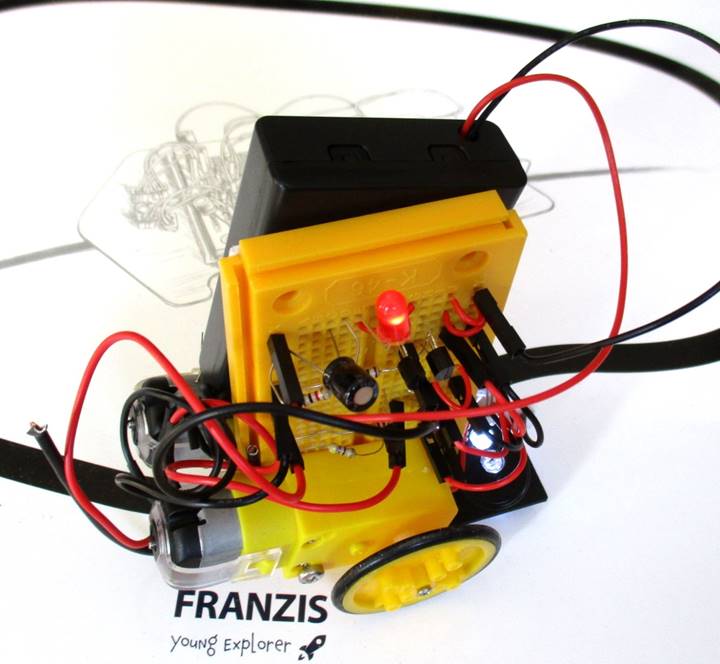
Bau einer Lichtschürze von Markus Feier

Ich habe eine einfache Lichtschürze an den Roboter gebaut. Nun läuft er auch am hellen Tag.