Raspberry Pi Pico als TPS
Elektronik-Labor
Projekte
Mikrocontroller
Raspberry
Diese Implementierung eines TPS-Systems
auf einem Raspberry Pico stammt von Robert Mitchell aus England und trägt den
Namen MicoPico. Jürgen Pintaske hat sich intensiv mit der TPS
beschäftigt und den Begriff für den englischen Sprachraum in MiCo
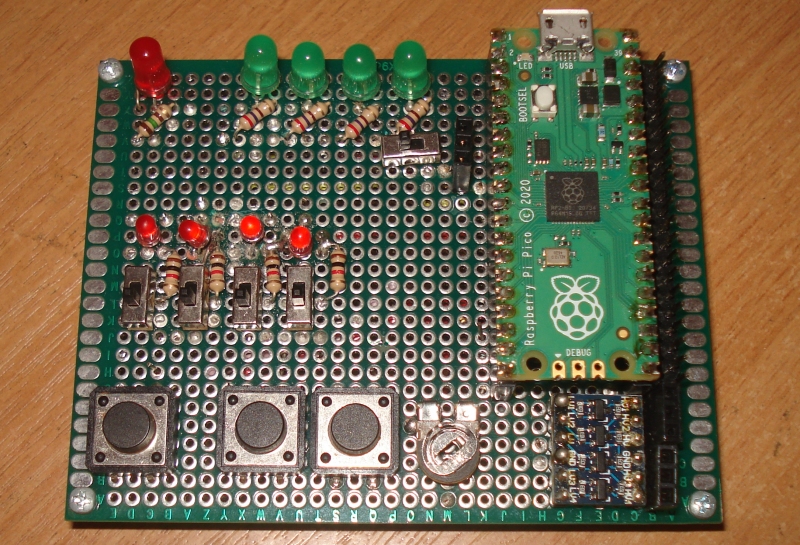
übertragen. Er war es auch, der die Testplatine oben gebaut hat.und mich auf Roberts Arbeit
aufmerksam gemacht hat. Jürgen hat eine öffentliche Facebook Seite
gegründet, die über den Fortgang der TPS-Projekte berichtet: https://www.facebook.com/groups/269499491046124
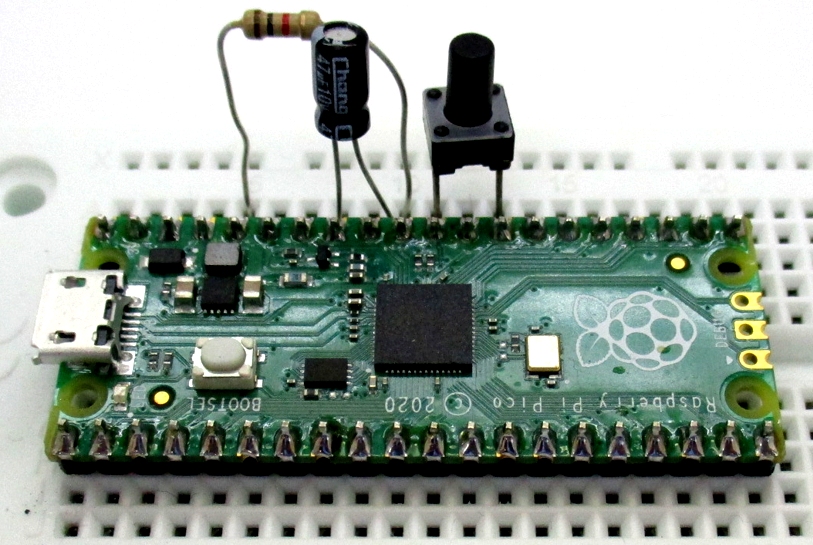
Robert hat mir den aktuellen Stand des Projekts geschickt, sodass
ich die Software ausprobieren konnte. Ich hatte ja schon meinen Pico
auf ein Steckboard gesetzt und mit einem Reset-Taster versehen.
Eigentlich sollte der Test also ganz einfach sein, aber es war
letztlich doch eine Herausforderung, die ich nicht ohne die fachkundige
Hilfe von Fabi geschafft habe.
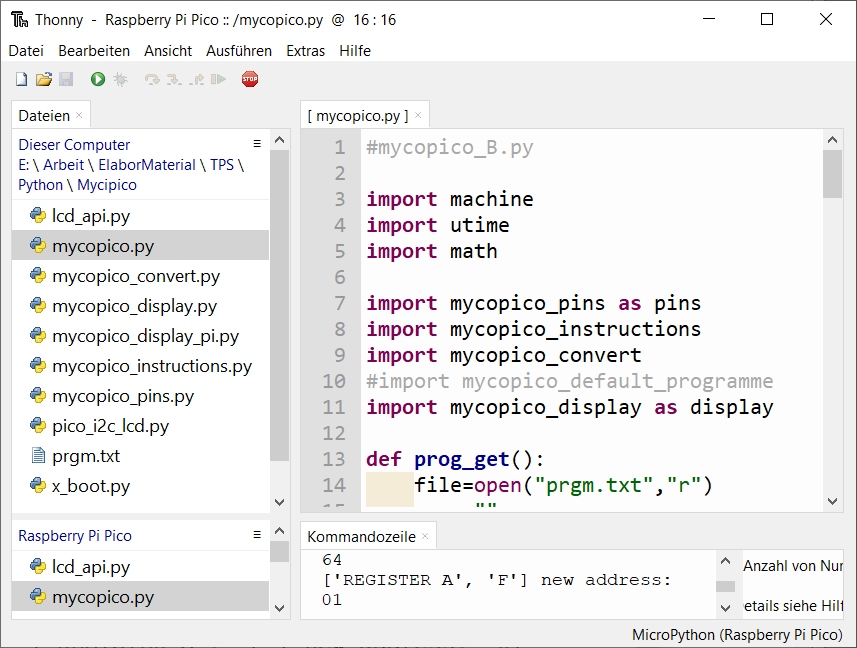
Robert hat das Projekt in mehrere Dateien aufgeteilt, was es sehr
übersichtlich macht. Ich hatte bisher aber nur mit
MicroPython-Programmen gearbeitet, bei denen alles in einem File lag.
Deshalb hatte ich keine Vorstellung davon, wie man mit den zu
importierenden Dateien umgehen musste, ein peinlicher
Anfängerfehler. Fabi hat es mir gezeigt: Man muss alle Dateien zuerst
in den Pico übertragen, erst von da kann er sie nachladen.
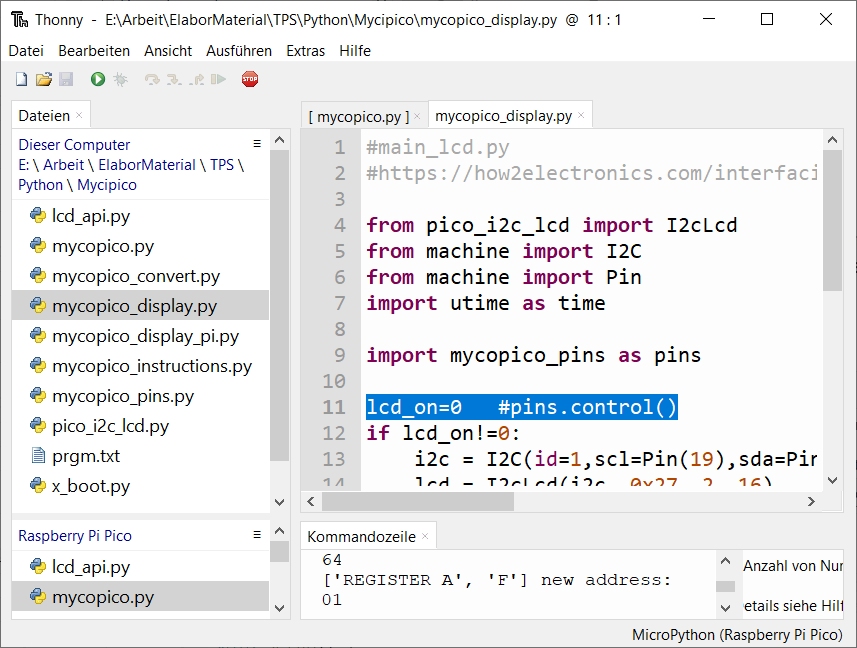
Die zweite Schwierigkeit bestand darin, dass Robert ein I2C-LCD
verwendet hat, ich aber kein solches hatte. In mycopico.display.py
konnte ich es aber an einer zentralen Stelle abschalten: lcd_on=0
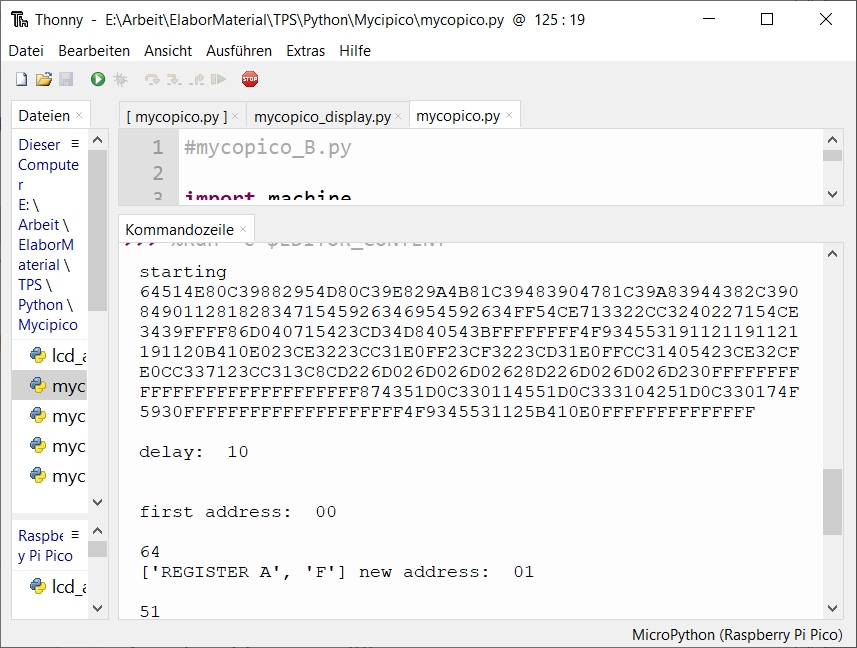
Jetzt läuft die Software! Zuerst wird die gesamte Sammlung der
Beispielprogramme und Unterprogramme aus der originalen TPS geladen und
dann ausgeführt.
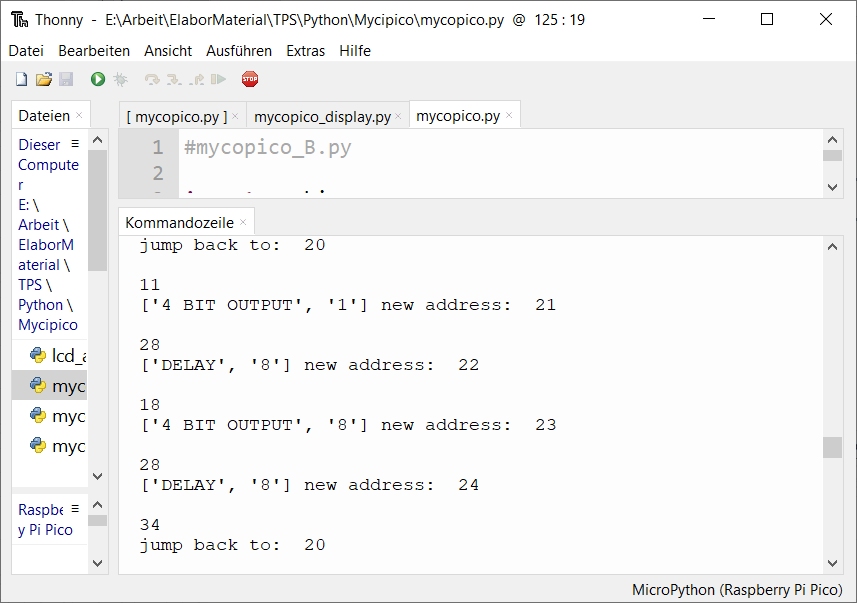
Und wie in der originalen TPS läuft nun das erste Beispielprogramm ab,
ein Wechselblinker mit den Ausgängen "1" und "8". Aber anders als in
der originalen TPS erhält man nun Ausgaben zu jeder Zeile und kann so
beobachten, wie das Programm nach einem Rücksprung auf die Adresse
20 immer wieder von vorn beginnt.
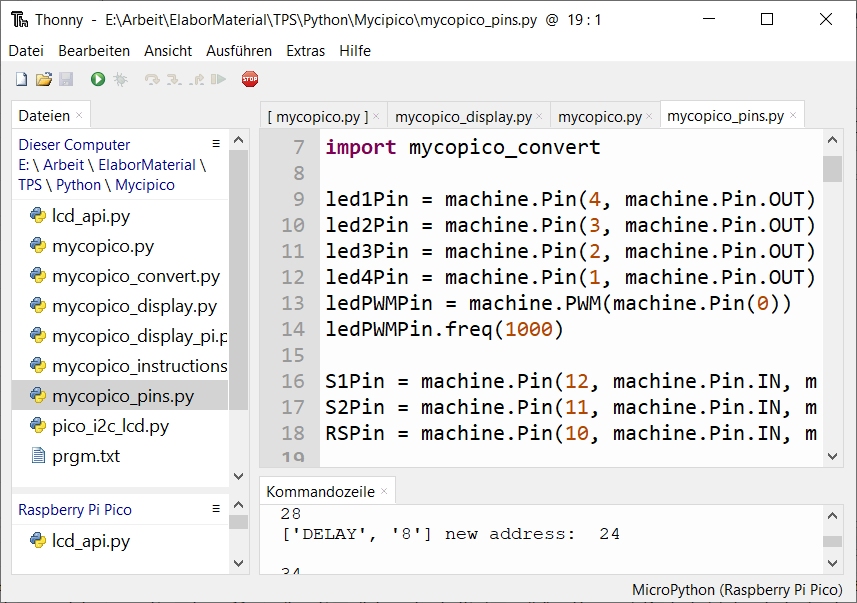
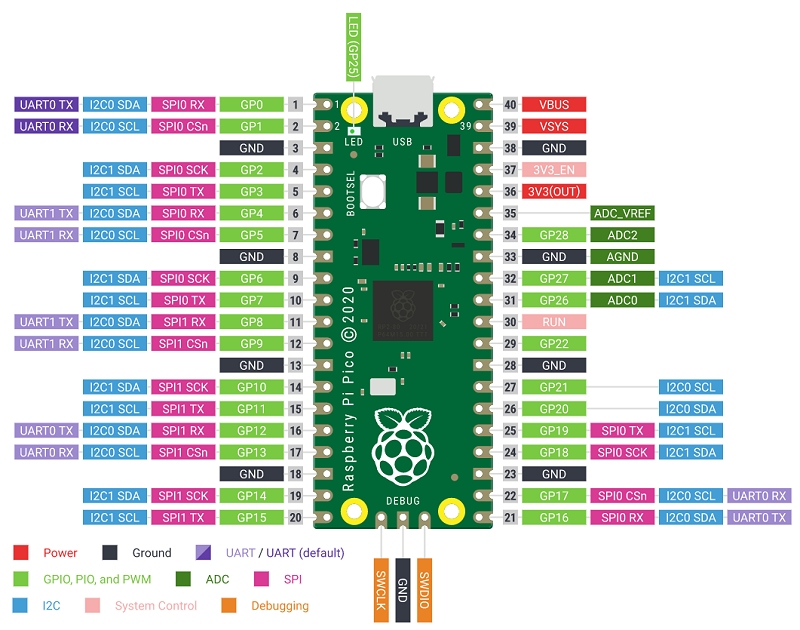
Jetzt fehlen nur noch die LEDs an den Ausgängen, dann ist die
Pico-TPS fast vollständig. Den Überblick verschafft die Datei
mycopice_pins.py. Die Ausgänge liegen an den Pins 1 bis 4. Dort wurden
nun die LEDs mit internen Vorwiderständen angeschlossen.
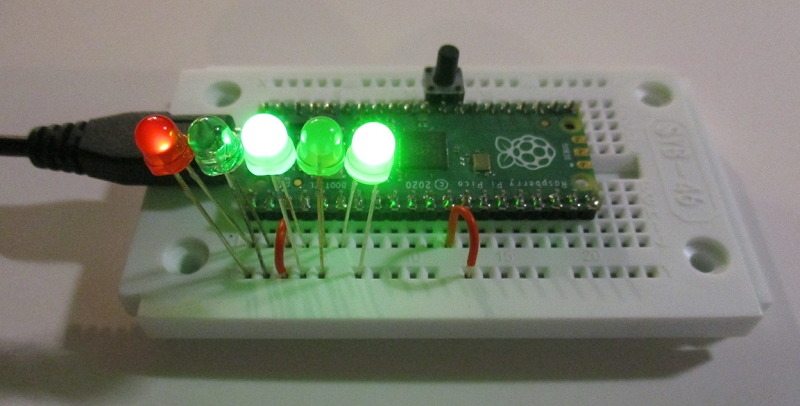
Hier läuft nun das Beispielprogramm 2, ein Aufwärtszähler mit
PWM-Ausgabe (rot). Die rechte Drahtbrücke zwischen Eingang 1 und GND
hat es gestartet. Alles wie gewohnt und genauso wie an der originalen
TPS.
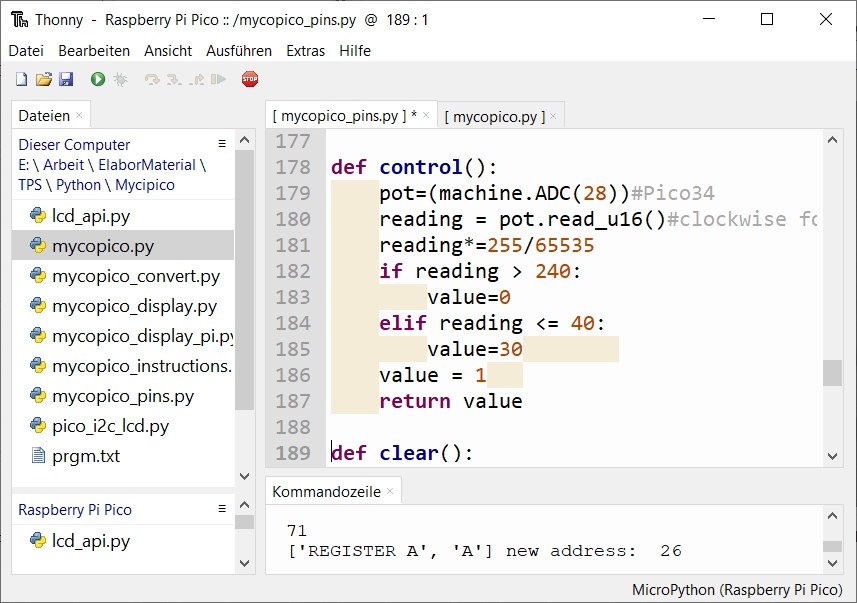
Noch ein Problemchen: Die Software verwendet ein Poti, mit dem man
die Arbeitsgeschwindigeit einstellen kann, zu erkennen auf dem Foto von
Robert ganz oben. Weil ich keins angeschlossen hatte, lief alles zu
langsam. Deshalb habe ich den Delay-Wert value = 1 in der
Funktion control() fest vorgegeben,
Soweit läuft es nun, und ich habe einiges über Python dazugelernt.
Vieles ist noch zu erforschen. Zum Beispiel sollte ich mal probieren,
eigene Programme einzugeben. Mit den Print-Ausgaben kann ich dann genau verfolgen, was jeder Befehl macht.
Elektronik-Labor
Projekte
Mikrocontroller
Raspberry