Die Arduino-kompatible Programmierung
kennt den Pulldown nicht. Deshalb muss man die Funktionen aus dem
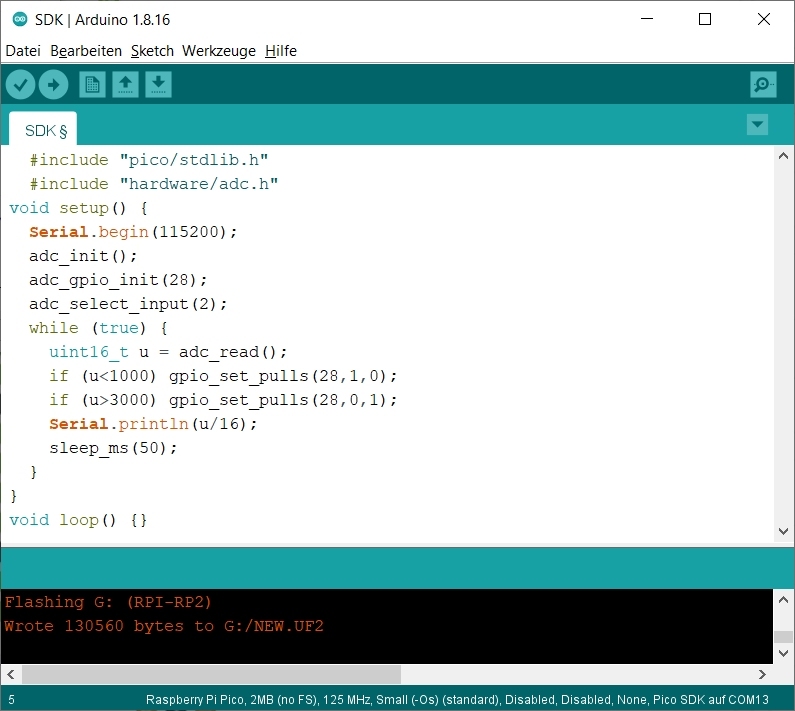
Raspberry Pi Pico SDK verwenden, die mit #include
"pico/stdlib.h" zugänglich gemacht werden. Dazu gehört auch
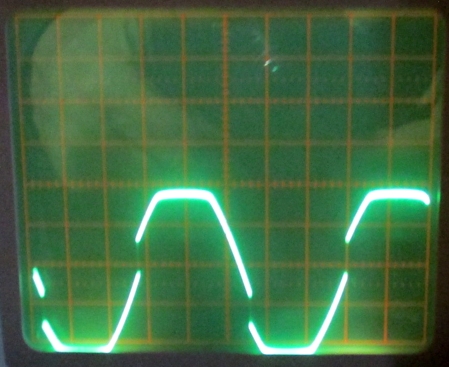
gpio_set_pulls(28,1,0), um den Pullup und/oder den Pulldown
einzuschalten. Hier werden beide abwechselnd aktiviert. Mit
#include "hardware/adc.h" kann man auch die Funktionen zum ADC
verwenden. Mit adc_read() erhält man die gewohnten 12 Bit Auflösung.